ул.Симферопольская
дом 5, офис 9
![]() Корзина
Корзина
Корзина пуста
Робот-пылесос ILIFE A8 с 360-градусной системой навигации доступен на AliExpress. Робот пылесос с камерой навигации
Обзор робота-пылесоса iLife A8 с навигацией и двумя видами щеток на выбор
Паспортные технические характеристики, комплект поставки
| два ведущих колеса, опорный поворотный ролик, вспомогательный фиксированный ролик |
| инерционное перемещение и вакуумная фильтрация |
| одно отделение, емкость 0,3 л |
| одна c ворсом или валик-скребок |
| две |
| резиновый скребок |
| автоматический всей доступной площади, локальный, вдоль препятствий, ручной, уборка по расписанию |
| нет данных |
| механический передний/боковой бампер, ИК-датчики приближения и перепада высоты |
| ИК-датчики поиска базы, верхняя видеокамера, датчик вращения опорного ролика, гироскоп (?), акселерометр (?) |
| механическая кнопка |
| ИК-пульт ДУ |
| светодиодный индикатор, голосовое оповещение и звуковые сигналы, ЖК-дисплей на пульте ДУ |
| до 90 минут |
| <5 часов |
| на зарядной базе с автоматическим возвратом или напрямую от блока питания |
| литий-ионный аккумулятор, 14,4 В, 2500 мА·ч, 36,0 Вт·ч |
| нет данных |
| 2,75 кг |
| ∅310×72 мм |
|
| iLife |
Внешний вид и функционирование

Робот-пылесос iLife A8 упакован в две коробки — внешнюю защитную из толстого гофрокартона, и внутреннюю из картона потоньше и уже с ручкой.
При необходимости ручку от внешней коробки можно втащить наружу, чуть подрезав внешнюю коробку.

В комплект поставки входят все необходимые для работы робота аксессуары, включая элементы питания для пульта ДУ.

Запасные части и расходные материалы в комплекте поставки представлены сменным складчатым фильтром последней ступени, валиком-скребком (щетка с ворсом установлена), двумя запасными резиновыми скребками и набором (правая и левая) боковых щеток. Есть и комбинированная щетка-гребенка, которую можно использовать для чистки пылесборника, самого робота и основной щетки в частности.
Краткое и полное руководства на английском языке. Качество текста и полиграфического исполнения хорошее.
Корпус робота изготовлен в основном из пластика. Верхняя половина корпуса и бампер имеют черное зеркально-гладкое относительно устойчивое к повреждениям покрытие, а нижняя — с более практичной матовой поверхностью без покрытия. Преимущественно темный цвет корпуса осложняет поиск робота в темных закоулках квартиры, когда он по какой-то причине не вернется на базу, также робота сложнее заметить боковым зрением, когда он путается под ногами, а значит, с большей вероятностью на него можно наступить. Верхняя панель прикрыта пластиной из минерального закаленного стекла, поэтому она не царапается и легко очищается, но и следы от пальцев на ней очень заметны. Пластиковый ободок сверху по периметру, вставка контрольной панели и фиксатор пылесборника имеют серебристое покрытие. На верхней панели ближе к передней части есть единственная механическая кнопка с подсвечивающимися словом Auto и значком питания.

В зависимости от текущего состояния этот индикатор светится или мигает зеленым, оранжевым или красным. Яркость индикатора невысокая, в освещенном помещении из-за отблесков на серебристой поверхности кнопки сложно рассмотреть, что именно показывает индикатор. Дополнительно о своем состоянии робот информирует с помощью коротких и не очень громких звуковых сигналов и плохоразборчивых сообщений на английском языке. Отключить звуковое оповещение нельзя. Перед кнопкой есть глазок направленной вверх камеры, прикрытый защитным минеральным стеклом.

Как указывает производитель «камера с алгоритмом PanoView строит карту помещений по потолку». Пылесос имеет почти идеально круглую форму диаметром 315 мм (здесь и далее по тексту приведены результаты наших измерений). Края снизу скошены, что помогает роботу преодолевать препятствия, а некоторая угловатость при переходе от верхней панели к боковой поверхности и бортик на бампере сверху снижают вероятность того, что пылесос будет застревать под препятствиями с небольшим просветом.
Масса робота равна 2,73 кг.
На днище расположены две контактные площадки, передний опорный поворотный ролик, боковые щеточки, крышка батарейного отсека, два ведущих колеса, отсек основной щетки. Ближе к краю сразу за бампером расположены три ИК-датчика перепада высоты, благодаря которым робот-пылесос может избежать падения со ступенек.

Передний ролик изготовлен из черного упругого пластика чередующегося с белым и жестким. Сделано это не просто так, а для того, чтобы робот с помощью оптического датчика, расположенного под роликом, мог определять, перемещается ли он во время уборки или нет, то есть застрял, в последнем случае робот выключается и подает сигнал бедствия.
Оси ведущих колес расположены на одном диаметре окружности корпуса, это позволяет роботу совершать разворот на месте без изменения границ, занимаемой им площади. Положительную роль играют относительно небольшая высота, равная 75 мм, и гладкий по периметру корпус. Ведущие колеса диаметром 65 мм оснащены резиновыми покрышками с неглубокими грунтозацепами. Колеса установлены на подпружиненных шарнирах, имеющих ход в 28 мм, что также улучшает способность робота преодолевать препятствия. Всю переднюю половину корпуса огибает подпружиненный бампер с небольшим ходом.
Сдвиг бампера вызывает срабатывание механических датчиков препятствий. Расстояние от пола до нижней точки бампера равно 16 мм, значит, на ступеньку такой высоты робот потенциально может заехать. Для защиты мебели спереди на бампер в нижней его части наклеена полоса из резины средней жесткости. Выше на бампере за окошком из тонированного пластика находятся ИК-датчики обнаружения препятствий, базовой станции и, возможно, приемник команд с пульта ДУ.
Нажав на фиксатор сзади, можно отсоединить пылесборник от корпуса робота.

Корпус пылесборника выполнен из слегка тонированного полупрозрачного пластика, но особой пользы это не приносит, так как взглянуть на него можно только или перевернув пылесос днищем вверх или вынув пылесборник. Передняя часть пылесборника откидывается на большой угол, что позволяет без труда вытряхнуть скопившийся мусор. Однако отсек для мусора относительно узкий и его будет неудобно чистить с помощью обычного пылесоса с щелевой насадкой, также передняя перегородка на откидывающейся части невысокая, поэтому мусор легко просыпается из закрытого пылесборника. Именно высота этой перегородки ограничивает полезную емкость пылесборника по отношению к тяжелому мусору.

В закрытом положении передняя крышка удерживается магнитными фиксаторами. Для полной очистки нужно открыть верхнюю крышку пылесборника и вынуть сначала складчатый фильтр тонкой очистки, потом поролоновый фильтр и следом предварительный сетчатый фильтр.
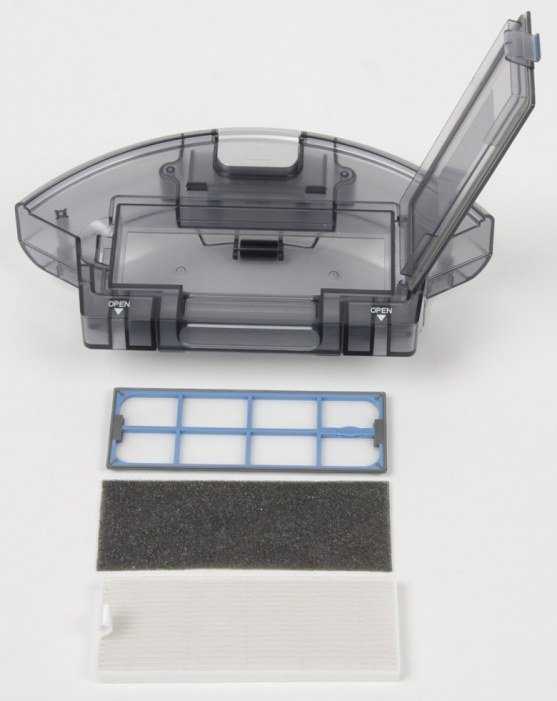
С нашей точки зрения такая многоступенчатая система фильтрации избыточна и только снижает воздушный поток, хватило бы и одного фильтра-сеточки. В любом случае, поролоновый уж точно лишний. Впрочем, в ходе тестов на первом фильтре собиралось много легкого мусора (и это с чистого пола), то есть мощность всасывания даже со всеми фильтрами относительно высокая. Отметим, что вентилятора в самом пылесборнике нет, поэтому пылесборник и два фильтра (кроме складчатого) можно мыть под водой, главное потом все хорошо высушить. Боковые щеточки имеют длинную щетину средней жесткости, пучки которой выходят из упругих поводков. Правая и левая щеточки отличаются поворотом поводков, а чтобы пользователь знал, какую куда устанавливать, на щеточках и на днище выдавлены буквы L и R. К оси привода щеточки крепятся с помощью самореза с головкой под крестовую отвертку.
Вал основной щетки гладкий, относительно большого диаметра и с продольными канавками — это облегчает освобождение вала просто пальцами без помощи инструментов от ниток, волос и прочего намотавшегося. Щетина на этой щетке имеет среднюю жесткость, а ее пучки идут волнами, что уменьшает звук от вращения щетки в контакте с полом. Торцы оси щетки заглушены бобышками из черного пластика. Из центра одной выходит стальная ось, которая, вращается в шариковом подшипнике, запрессованном в торец оси щетки. На эту ось надевается бобышка из резины, которая по замыслу разработчиков должна снижать шум и вибрации.
Альтернативная основная щетка представляет собой цилиндр из резины с лопастями-скребками. В остальном ее конструкция схожа с описанной выше щеткой. Основное преимущество такой безворсовой щетки перед традиционной со щетиной заключается в том, что на эту резиновую не так быстро наматываются волосы, шерсть, волокна и т. д., а все намотавшееся легко снимается при очистке.
Щетка в отсеке фиксируется рамкой из желтого пластика. На этой рамке есть резиновый скребок, который помогает щетке подхватывать мусор с пола и забрасывать его в пылесборник.

Отметим, что редукторы приводов щеток и колес позволяют их проворачивать рукой, это очень помогает, когда нужно вытащить робота, например, из-под дивана, под которым он застрял, или распутать что-то намотавшееся на колеса или щеточки. При уборке передние боковые щеточки подгребают мусор к центру, затем частички мусора закидываются основной щеткой в пылесборник, а поток воздуха помогает засасывать в пылесборник самый легкий мусор. Упругие прокладки на всем пути от входного отверстия пылесборника до вентилятора исключают паразитный подсос воздуха мимо фильтров и пылесборника.
На правом боку находится разъем питания для прямой зарядки аккумулятора и клавиша, отключающая батарею от цепей робота.
На стенке отсека для пылесборника за резиновой заглушкой есть разъем Micro-USB, который используется в сервисных целях, обновление пользователем встроенного ПО не поддерживается.

В данном роботе установлена литий-ионная аккумуляторная батарея. Батарейный блок составлен из четырех цилиндрических элементов популярного типоразмера 18650.

База, на которой пылесос заряжается, имеет большое основание, на которое снизу наклеены четыре противоскользящие резиновые ножки-накладки.

Питается база от внешнего адаптера питания, который также можно использовать для зарядки робота, минуя базу, если по какой-то причине она недоступна. Кабель можно уложить в каналы на днище базы и вывести на правую или на левую сторону.

К пылесосу прилагается небольшой ИК-пульт дистанционного управления.

Экранчик в передней части пульта показывает текущее время и время, на которое запланирован автоматический запуск уборки.
Робот-пылесос iLife A8 имеет четыре режима уборки:
Автоматический режим — робот убирает всю доступную ему площадь, а убрав ее, возвращается на базу для зарядки аккумулятора. Если одного заряда не хватило на уборку всей площади, то робот продолжит уборку после зарядки. Сколько может быть таких циклов и каков максимальный размер убираемой площади неизвестно. Если запускать робота не с базы, то, выполнив уборку, он возвращается в то место, откуда был запущен. Включается автоматический режим нажатием на кнопку запуска на пульте или кнопку Auto на самом роботе. Также этот режим используется во время уборки по расписанию.
В ручном режиме уборки направление движения робота задается с помощью кнопок пульта дистанционного управления. Робот поворачивает на месте на фиксированный угол (слишком большой для точного задания направления) при нажатии на стрелки вправо-влево на пульте и движется вперед до столкновения с препятствием при нажатии на стрелку вверх.
Для интенсивной очистки определенного места нужно перенести туда робота или направить его в нужное место в режиме ручного управления, а затем нажать на кнопку со значком прицела на пульте. Робот выполнит уборку в квадрате со стороной примерно в 105 см.
Еще одним вариантом уборки является движение только вдоль стен и препятствий. Включает этот режим кнопка на пульте со значком квадратика со стрелкой.
Во время уборки в любом из режимов нажатие на кнопку Max на ДУ повышает мощность всасывающего вентилятора робота (повторное нажатие на эту кнопку снижает мощность до нормальной).
Есть возможность назначить ежедневный запуск уборки в автоматическом режиме на определенное время. Для этого на пульте нужно установить текущее время и время начала уборки, контролируя по звуковым сигналам, что таймеры робота и пульта синхронизированы.
Тестирование
Ниже представлены результаты тестирования по нашей методике, подробно описанной в отдельной статье. Сначала в режиме с нормальной мощностью вентилятора и щеткой с ворсом.
| 1 | 8:00 | 79,0 |
| 2 | 7:12 | 89,6 |
| 3 | 7:34 | 92,2 |
Видео ниже снято сверху с одной точки, база находится внизу по центру, при обработке часть видеоряда ускорена в десять раз, первый запуск на уборку:
Робот убирает быстро, но качество не самое высокое, мало того, что за один проход много риса остается на полу, так еще и не везде робот проезжает при первом запуске. Вот результат после первого цикла уборки:

После третьего запуска мусора существенно меньше:

В углах мало, в загончике мало, в основном мусор остался около базы:



Доступную территорию робот однократно проходит змейкой с минимальным перекрытием и по возможности наиболее рациональным способом. Робот определенно строит и использует карту убираемой поверхности, это видно по маршруту движения — он по возможности убирает поверхность только один раз и целенаправленно переходит к тому месту, которое он еще не убирал. Без карты такое поведение было бы невозможно осуществить. По крайней мере, в небольшом тестовом помещении робот сохраняет ориентацию даже в полной темноте, то есть камера не является основным и единственным навигационным прибором. Робот с готовностью забирается в узкий загончик (на 50 мм шире ширины робота) и тщательно там убирает. С базой робот обращается очень аккуратно, даже слишком аккуратно, не толкает и не сдвигает, но и объезжает ее далеко, оставляя около нее часть мусора. Паркуется робот уверенно, и в наших тестах всегда с первого раза. Между высокими вертикальными и хорошо отражающими ИК-лучи стенками и корпусом робота обычно остается небольшой зазор, тогда как к низким, наклонным (например, к плинтусу) или черным в ИК-свете стенкам робот подъезжает вплоть до срабатывания механического датчика в бампере.
Теперь в режиме с высокой мощностью вентилятора:
| 1 | 7:51 | 81,6 |
| 2 | 7:42 | 89,6 |
| 3 | 7:09 | 91,5 |
Увеличение мощности вентилятора в случае нашего тестового мусора не улучшает качество уборки. Видимо, рис в основном забрасывается щеткой, а не засасывается потоком воздуха. Теперь установим щетку без ворса, режим нормальной мощности вентилятора:
| 1 | 7:10 | 81,1 |
| 2 | 7:16 | 90,6 |
| 3 | 7:28 | 92,8 |
В данном случае щетка без ворса настолько же эффективна, что и с ворсом.
На видео ниже показан вариант локальной уборки:
Дополнительно были проведены натурные испытания. Для этого в офисном и относительно чистом помещении был выгорожен участок из нескольких комнат общей площадью примерно 94 м². В коридоре (23 м²) только шкаф в торце, в других помещениях заполнение мебелью среднее, людей нет. Схема помещения приведена ниже. На ней цветными прямоугольниками отмечены доступные роботу комнаты. База робота установлена на схеме внизу справа.
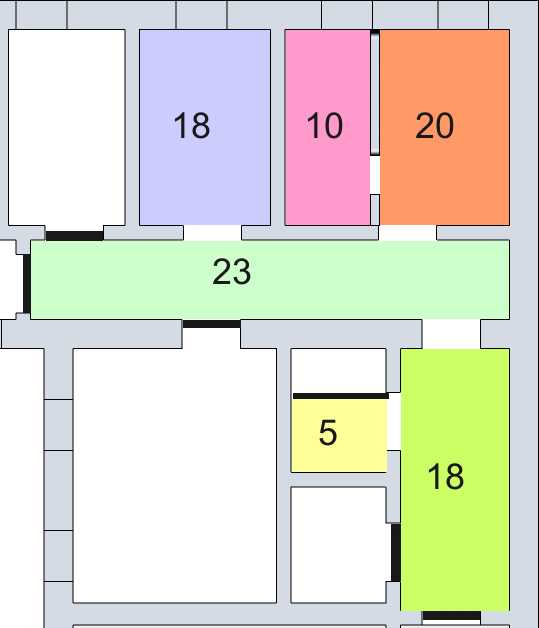
Установлена была щетка без ворса, мощность вентилятора — нормальная. На одном заряде аккумулятора робот убрал этот участок примерно 2,5 раза (235 м² суммарно), затратив на все около 2 часов 30 минут Два раза робот, закончив уборку, целенаправленно возвращался на базу и парковался на ней (но его мы с нее сразу запускали обратно на уборку). Один раз уборку пришлось прервать примерно на половине, так как что-то попало в оптический датчик за бампером, пришлось робота потрясти, вернуть на базу и запустить на уборку. На взгляд особо больших пропусков не было. Стоит отметить, что, несмотря на препятствия в виде порожков уступом и ножек многочисленных стульев, робот заезжал, куда мог протиснуться и нигде не застревал.
На боковые щетки и на само тело основной щетки ничего не намоталось. Намоталось на торцы, но все легко снялось.


Пылесборник переполнился так, что мусор из него начал вываливаться обратно.

На восстановление заряда роботу требуется провести на базе 4 часа 2 минуты. Во время зарядки от сети потребляется до 15 Вт. 0,6 Вт потребляется после окончания зарядки и столько же потребляет база без робота.
Уровень шума немного увеличивается при включении вентилятора на максимальную мощность.
| Нормальная | 53,4 |
| Максимальная | 55,8 |
Робот относительно тихий. Характер издаваемого им шума не раздражает, находиться в одной комнате с работающим роботом более-менее комфортно. Для сравнения, уровень шума в этих условиях обычного (не самого тихого) пылесоса равен примерно 76,5 дБА.
Выводы
В автоматическом режиме iLife A8 убирает, однократно обходя змейкой доступную ему площадь помещения, и сам возвращается на базу для зарядки аккумулятора. Убирает робот быстро, но не очень качественно; впрочем, последовательные запуски вручную или по расписанию этот недостаток частично исправляют. При необходимости пользователь может вручную управлять движением робота, включать режимы интенсивной очистки локального участка или следования вдоль стен. К особенностям робота относятся возможность установки альтернативной безворсовой щетки-скребка, на которую в меньшей степени наматываются волосы, шерсть, нитки и пр., поэтому данного уборщика можно рекомендовать при наличии шерстистых домашних животных.
Достоинства:
- Система ориентации и прокладка рационального маршрута
- Как минимум однократное возобновление уборки после подзарядки
- Большая максимальная площадь уборки от одного заряда аккумулятора
- Альтернативная безворсовая основная щетка
- Тихая работа
- Невысокий корпус
- Уборка по расписанию
- Устойчивая база
- Хорошая комплектация
Недостатки:
- Оставляет много мусора около базы
- Небольшой полезный объем пылесборника
www.ixbt.com
Робот-пылесос ILIFE A8 с 360-градусной системой навигации доступен на AliExpress
Дебютировавший на выставке CES 2018 робот-пылесос ILIFE A8 с 360-градусной системой навигации PanoView появился в глобальной продаже на торговой площадке AliExpress.

ILIFE A8 является новейшей моделью в премиальной серии ILIFE. Новинка оснащена инновационной системой панорамной навигации с использованием искусственного интеллекта.
«ILIFE A8 сочетает наши новейшие достижения в области искусственного интеллекта и самонаводящихся роботизированных технологий, — говорит Чэнь Гуанлян (Chen Guanliang), вице-президент ILIFE по научно-исследовательским работам. — Система навигации PanoView основана на 360-градусной камере видеонаблюдения и графическом алгоритме CV-SLAM, которые в совокупности обеспечивают значительный прирост эффективности уборки, предоставляя потребителям технологию уборки будущего и передовой искусственный интеллект».
Главные особенности ILIFE A8:
Система навигации PanoView: полагается на 360-градусную камеру видеонаблюдения с усовершенствованным графическим алгоритмом CV-SLAM.
Роботы-пылесосы завоевали популярность у потребителей с самого начала своего появления на рынке. Ранние модели роботов-пылесосов не имели возможности «видеть», чтобы определять маршрут движения по дому, что приводило к частым столкновениям с мебелью и другими препятствиями на пути движения. Хотя со временем технологии совершенствовались, большинство роботов-пылесосов из числа предлагаемых в настоящее время на рынке все ещё полагается на гироскоп для соблюдения запланированной траектории. Это приводит к неполной уборке или увеличению её продолжительности из-за повторного движения по уже пройденным до этого участкам.
Навигационная система PanoView позволяет избежать таких проблем. Внешняя камера Hawkeye с углом обзора 360° сканирует комнаты и поставляет системе PanoView панорамные изображения в реальном масштабе времени. Эта визуальная информация используется системой для построения маршрута движения ILIFE A8 с учётом всех возможных препятствий.

Высокоскоростная обработка данных для прокладки маршрута обеспечивается тремя высокопроизводительными процессорами с использованием графического алгоритма CV-SLAM, который позволяет значительно сократить время создания схемы помещения и повысить её точность.
Система очистки CyclonePower третьего поколения: выполняет очистку в три этапа, повышая тем самым эффективность уборки. Две боковые щетки эффективно удаляют грязь и мусор по углам или краям, основная щётка сметает собранный мусор с ковра и пола, и всё это засасывается в пылесборник.
Интеллектуальная автоматизация: голосовое оповещение i-Voice и индивидуальное планирование. Технология i-Voice даёт ILIFE A8 возможность «общаться» с пользователями, сообщать о ходе работы или предупреждать о сбое. У ILIFE A8 также имеется функция индивидуального планирования, которая позволяет заранее задавать график уборки на любое время.
Ультратонкая конструкция: при толщине корпуса 72 мм робот-пылесос ILIFE A8 позволяет удалять пыль и грязь в самых труднодоступных местах.
Многофункциональные щётки. У аппарата имеются взаимозаменяемые щетинная и резиновая щётки. Щетинная щётка обеспечит глубокую очистку ворса ковров и удаление грязи, а резиновая поможет справиться с клубками шерсти домашних питомцев на полу.
ILIFE A8 отличается минималистским дизайном. На его верхней панели имеется всего лишь одна кнопка для запуска режима автоматической уборки «AUTO». Управление устройством осуществляются с помощью пульта дистанционного управления.
ILIFE A8 автоматически возвращается к док-станции для перезарядки в случае, если его батарея разрядилась. Когда перезарядка завершена, робот-пылесос возобновляет процесс уборки помещения с того места, где он был прерван.
Можно с уверенностью утверждать, что для ILIFE A8 нет «мёртвых зон», куда он не сможет добраться, а также нет невыполнимых задач по уборке помещения.
С 26 февраля AliExpress предлагает ILIFE A8 в более чем 14 странах, включая Россию, США, Канаду, Австралию, Германию, Францию, Италию, Испанию, Сингапур и Нидерланды.
Если вы заметили ошибку — выделите ее мышью и нажмите CTRL+ENTER.
3dnews.ru
Робот-пылесос Jisiwei S+: Not Just A Robot!
Всех с наступившим! Сегодня от меня обзор необычного робота-пылесоса со встроенной IP-камерой, удаленным управлением и возможностью наблюдения за своим жилищем из любой точки мира, где есть интернет. В обзоре много тестов, фоток и видео, а также разборка и изучение его внутреннего мира. Заходите, читайте, смотрите ) Все больше и больше моделей всевозможной домашней техники буквально подсаживаются на интернет-зависимость и жить не могут без Wi-Fi. Несколько лет назад первые экземпляры лампочек, чайников или розеток с Wi-Fi у большинства вызывали только недоумение и насмешки. А в голове был вопрос: «Зачем ??? Раньше же как то без всего этого обходились». Прогресс не стоит на месте, сегодня уже большинству даже мало интересующихся технологиями людей знакомо понятие «интернет вещей» (Internet of Things), по крайней мере они его хотя бы просто слышали. А дальнейшее направление развития техники сомнений уже не вызывает. Итак, в моем обзоре типичный представитель техники поколения «интернета вещей» — робот-пылесос с выходом в интернет по Wi-Fi, встроенной IP камерой и управлением через смартфон из любой точки мира. И, что самое удивительное, сейчас начало 2017 года и вот это сочетание слов уже не вызывает никакого удивления. Мы привыкли к подобным штуковинам. Единственное, о чем мы сейчас думаем: «Интересно, а картинка с камеры хорошая? А задержка большая? Прикольно бы прокатиться по дому и понаблюдать, что кот делает, пока я на работе..))» В общем никакого удивления, как несколько лет назад. Вот мы прагматично и не предвзято рассмотрим, насколько полезным в реальной жизни окажется технологичный уборщик-наблюдатель.Описание и характеристики. Характеристики с официального сайта: Working voltage: 14.8V Charging voltage: 19V Working Power: 24W Remote control: WIFI, 3G, 4G App Support: Android, IOS Controller: Android, IOS APP /Infrared remoter Remote control Distance: No limited when connect to wifi / within 7m Language Support: Chinese, English Sweeping area: 50-200㎡ Noise: 20/50dB Battery Type: Chargeable Li-battery Battery capacity: 2600mAh Scope of application: wooden, carpet, planks, marble, tiles Full-Charging: 4 hours Battery working time (when full charged): 2 hours Camera view Angle: 120 degree wide lens IP camera pixels: 1.0MP Height: 85mm Diameter: 350mm Dust bin capacity: 500ml
Комплект поставки
Пылесос поставляется в довольно крупной коробке из картона, которая помещена в еще одну коробку из упаковочного картона (нет на фото). В левом верхнем углу логотип производителя и официальный слоган — «Not Just A Robot», который я и использовал в заголовке обзора.
В левом верхнем углу логотип производителя и официальный слоган — «Not Just A Robot», который я и использовал в заголовке обзора. Внутри все упаковано хорошо и в пути при такой упаковке с содержимым ничего случиться не должно.
Внутри все упаковано хорошо и в пути при такой упаковке с содержимым ничего случиться не должно.  Комплект поставки:
Комплект поставки: 1 x Пылесос
1 x База для подзарядки АКБ
1 x Блок питания
1 x Пульт дистанционного управления
1 x Запасной фильтр
1 x Щетка для чистки
2 x Запасные боковые щетки
1 x «Подшипник» для центральной щетки
2 x Тряпочки для мытья пола
1 x Держатель тряпочки
1 x Инструкция на английском языке.
1 x Пылесос
1 x База для подзарядки АКБ
1 x Блок питания
1 x Пульт дистанционного управления
1 x Запасной фильтр
1 x Щетка для чистки
2 x Запасные боковые щетки
1 x «Подшипник» для центральной щетки
2 x Тряпочки для мытья пола
1 x Держатель тряпочки
1 x Инструкция на английском языке.
Теперь рассмотрим комплект подробнее.
Собственно пылесос. ИК пульт дистанционного управления.
ИК пульт дистанционного управления. Блок питания.
Блок питания.  Вилка английская, адаптер работает в электросетях с напряжением от 100 до 240 Вольт и частотами 50/60 Гц, но для использования в «наших» электросетях придется использовать переходник под евровилку. На выходе 19 Вольт, 1 А.
Вилка английская, адаптер работает в электросетях с напряжением от 100 до 240 Вольт и частотами 50/60 Гц, но для использования в «наших» электросетях придется использовать переходник под евровилку. На выходе 19 Вольт, 1 А. База для подзарядки.
База для подзарядки. Пылесос во время зарядки.
Пылесос во время зарядки. Щетка для чистки и запасная опора центральной щетки.
Щетка для чистки и запасная опора центральной щетки. Запасной фильтр грубой очистки.
Запасной фильтр грубой очистки. Запасные боковые щетки.
Запасные боковые щетки. Тряпочки для мытья пола и держатель.
Тряпочки для мытья пола и держатель.  Инструкция.
Инструкция.
Внешний вид, элементы пылесоса
Пылесос целиком сделан из пластика, но он довольно толстый и прочный, детали стыкуются плотно, при попытке сжать скрипа и люфтов нет. Расцветка корпуса выполнена с использованием красок нескольких оттенков и цветов, основная часть корпуса выкрашена в бронзовый металлик и сверху покрыта лаком.
Также доступны и другие варианты внешнего оформления.
Расцветка корпуса выполнена с использованием красок нескольких оттенков и цветов, основная часть корпуса выкрашена в бронзовый металлик и сверху покрыта лаком.
Также доступны и другие варианты внешнего оформления. Пылесос, как и большинство его собратьев, имеет круглую форму. Диаметр этой нелетающей тарелки 35 см, высота без учета выступа модуля камеры и ИК датчика около 7 см, полная — в районе 9 см.
Пылесос, как и большинство его собратьев, имеет круглую форму. Диаметр этой нелетающей тарелки 35 см, высота без учета выступа модуля камеры и ИК датчика около 7 см, полная — в районе 9 см.  На выступе расположен модуль камеры за защитным стеклом, микрофон, индикаторный светодиод, а между ними — сенсор для предотвращения столкновения с мебелью. Круглая прозрачная шайба в самом верху — это обычный ИК приемник, никаких лазеров тут нет.
На выступе расположен модуль камеры за защитным стеклом, микрофон, индикаторный светодиод, а между ними — сенсор для предотвращения столкновения с мебелью. Круглая прозрачная шайба в самом верху — это обычный ИК приемник, никаких лазеров тут нет. На передней части в верхней половине за глянцевым черным пластиком расположены ИК сенсоры, а нижняя половина — это неподвижный резиновый бампер, ближе к средине есть дополнительный резиновый выступ.
На передней части в верхней половине за глянцевым черным пластиком расположены ИК сенсоры, а нижняя половина — это неподвижный резиновый бампер, ближе к средине есть дополнительный резиновый выступ. На боковые стороны примерно до половины корпуса заходит глянцевое стекло, за которым прячутся ИК сенсоры, благодаря которым пылесос «видит» стену и движется вдоль нее.
На боковые стороны примерно до половины корпуса заходит глянцевое стекло, за которым прячутся ИК сенсоры, благодаря которым пылесос «видит» стену и движется вдоль нее.  Сзади контейнер для мусора
Сзади контейнер для мусора Справа от него разъем для зарядки АКБ от адаптера без использования зарядной базы.
Справа от него разъем для зарядки АКБ от адаптера без использования зарядной базы. Теперь посмотрим, что снизу.
Теперь посмотрим, что снизу. Посредине имеются 2 наклейки: одна с информацией о модели и некоторыми характеристиками, вторая будет использоваться для привязки пылесоса к приложению, на ней уникальная пара логин/пароль и QR-код для считывания с помощью оригинального приложения.
Посредине имеются 2 наклейки: одна с информацией о модели и некоторыми характеристиками, вторая будет использоваться для привязки пылесоса к приложению, на ней уникальная пара логин/пароль и QR-код для считывания с помощью оригинального приложения. В передней части расположены 2 боковые щетки, сенсоры, которые предотвращают падение с лестницы, переднее колесико (свободно вращается, не имеет привода от мотора), по бокам от него расположены контактные площадки для зарядки на базе.
В передней части расположены 2 боковые щетки, сенсоры, которые предотвращают падение с лестницы, переднее колесико (свободно вращается, не имеет привода от мотора), по бокам от него расположены контактные площадки для зарядки на базе. Возле ведущих колес расположены аналогичные сенсоры. Сами колеса подпружинены, имеют ходы около 1,5-2 см. Примерно такие преграды и сможет преодолеть пылесос, не более.
Возле ведущих колес расположены аналогичные сенсоры. Сами колеса подпружинены, имеют ходы около 1,5-2 см. Примерно такие преграды и сможет преодолеть пылесос, не более.  За правым колесом расположен тумблер для полного отключения аппарата. Крайне нейдобное расположение, благо пользоваться им придется не часто. Например для отключения на случай длительного хранения или транспортировки.
За правым колесом расположен тумблер для полного отключения аппарата. Крайне нейдобное расположение, благо пользоваться им придется не часто. Например для отключения на случай длительного хранения или транспортировки.  Центральная щетка, рамка и боковая опора.
Центральная щетка, рамка и боковая опора. За контейнером установлен фильтр тонкой очистки.
За контейнером установлен фильтр тонкой очистки. Вот и сам контейнер. В месте примыкания к фильтру вокруг отверстия имеется прорезиненное уплотнение.
Вот и сам контейнер. В месте примыкания к фильтру вокруг отверстия имеется прорезиненное уплотнение. Половинки смыкаются на защелках, внутри по стыку частей также имеется резиновое уплотнение для обеспечения герметичности.
Половинки смыкаются на защелках, внутри по стыку частей также имеется резиновое уплотнение для обеспечения герметичности. Внутри установлен съемный фильтр грубой очистки.
Внутри установлен съемный фильтр грубой очистки.  Для облегчения чистки или замены его достаточно просто потянуть на себя.
Для облегчения чистки или замены его достаточно просто потянуть на себя.
Разборка
Теперь посмотрим как и из чего же он собран. (Хронология обзора нарушена, естественно, сначала я провел тесты, а после уже разбирал. Так что на некоторых фото вы увидите следы его работы)
Начнем с зарядной базы. Разбирается просто — откручиваем 4 шурупа снизу и рассоединяем части. Внутри ничего особо интересного, плата с ИК светодиодами для наведения робота на базу позиционирования на контактные площадки. Судя по маркировке используется на нескольких моделях.
Внутри ничего особо интересного, плата с ИК светодиодами для наведения робота на базу позиционирования на контактные площадки. Судя по маркировке используется на нескольких моделях. Пора разобрать и сам пылесос.
Пора разобрать и сам пылесос.  Начнем с АКБ. Откручиваем 2 шурупа и открываем батарейный отсек.
Начнем с АКБ. Откручиваем 2 шурупа и открываем батарейный отсек. Судя по маркировке батарея собрана последовательно из 4 элементов 18650 и имеет емкость 2600 мА/ч.
Судя по маркировке батарея собрана последовательно из 4 элементов 18650 и имеет емкость 2600 мА/ч. Под термоусадкой действительно 4 элемента 18650 и плата защиты. Но вот емкость 2200 вместо заявленных 2600 мА/ч. Сами элементы не очень известного бренда LISHEN, модель LS LR1865SZ. Производитель вполне неплохой, их АКБ встречаются в банках силы xiaomi, неоригинальных, но качественных АКБ для ноутбуков и др., да и на форуме об электротранспорте хвалят как недорогую альтернативу более именитым брендам.
Под термоусадкой действительно 4 элемента 18650 и плата защиты. Но вот емкость 2200 вместо заявленных 2600 мА/ч. Сами элементы не очень известного бренда LISHEN, модель LS LR1865SZ. Производитель вполне неплохой, их АКБ встречаются в банках силы xiaomi, неоригинальных, но качественных АКБ для ноутбуков и др., да и на форуме об электротранспорте хвалят как недорогую альтернативу более именитым брендам.  Плата защиты. Все элементы с внутренней стороны.
Плата защиты. Все элементы с внутренней стороны.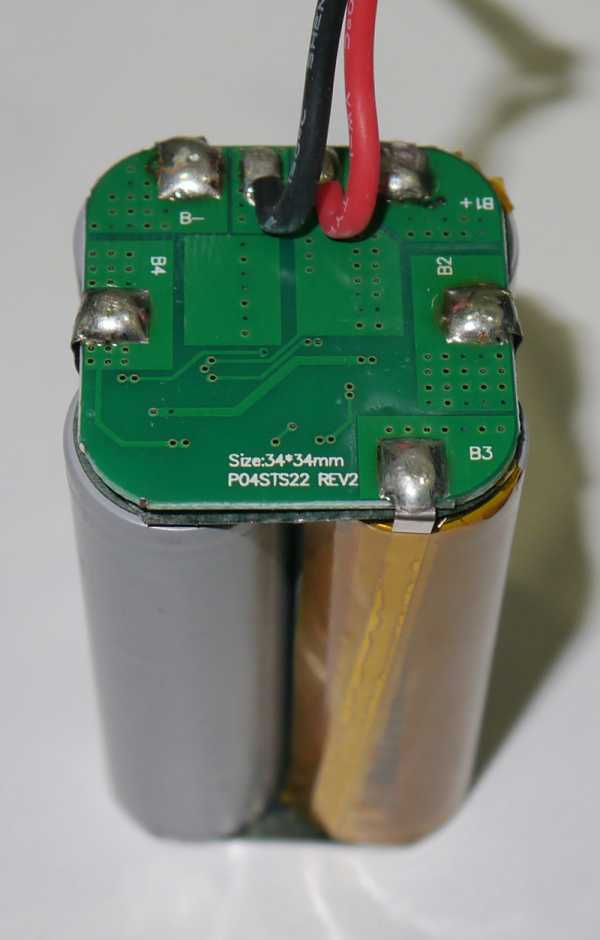 Разбираем дальше. Я выкрутил все шурупы, что видел. Хотя это было и не обязательно.
Разбираем дальше. Я выкрутил все шурупы, что видел. Хотя это было и не обязательно. Теперь можно приподнять верхнюю часть и отсоединить все провода, идущие между блоками на разных частях корпуса.
Теперь можно приподнять верхнюю часть и отсоединить все провода, идущие между блоками на разных частях корпуса. Теперь верхнюю часть можно отложить в сторону и рассмотреть подробнее нижнюю.
Теперь верхнюю часть можно отложить в сторону и рассмотреть подробнее нижнюю. Приводные электромотрчики и микровыключатели, фиксирующие крайнее положение хода подвески колеса.
Приводные электромотрчики и микровыключатели, фиксирующие крайнее положение хода подвески колеса.  С противоположной стороны все аналогично.
С противоположной стороны все аналогично. Крыльчатку вращает обычный двигатель. А А4 используется бесщеточный двигатель.
Крыльчатку вращает обычный двигатель. А А4 используется бесщеточный двигатель. Фильтр тонкой очистки. Его придется рано или поздно чистить, запасного нет. Но вытянуть можно и без полной разборки.
Фильтр тонкой очистки. Его придется рано или поздно чистить, запасного нет. Но вытянуть можно и без полной разборки. Основная плата. Собрана вполне прилично, никаких серьезных дефектов монтажа не обнаружено.
Основная плата. Собрана вполне прилично, никаких серьезных дефектов монтажа не обнаружено. «Мозг» робота — микроконтроллер STM32F101VB
«Мозг» робота — микроконтроллер STM32F101VB Верхняя часть корпуса. Здесь расположены модули дисплея, камеры, wi-fi и антенна.
Верхняя часть корпуса. Здесь расположены модули дисплея, камеры, wi-fi и антенна. На этой плате можем увидеть аналогичную наклейку, как и на днище пылесоса, вся информация совпадает.
На этой плате можем увидеть аналогичную наклейку, как и на днище пылесоса, вся информация совпадает. Я открутил плату и удивился наличию слота для карты памяти. Но в приложении никакого фунционала, связанного с использованием внутренней памяти нет. Возможно, будет реализовано в следующей модели. На этой же плате расположен и WiFi чип MTK7601U стандарта 802.11b/g/n и скоростями до 150Mbit.
Я открутил плату и удивился наличию слота для карты памяти. Но в приложении никакого фунционала, связанного с использованием внутренней памяти нет. Возможно, будет реализовано в следующей модели. На этой же плате расположен и WiFi чип MTK7601U стандарта 802.11b/g/n и скоростями до 150Mbit. На этой плате установлена и еще одна, на базе SoC HI3518, которая используется в IP-камерах.
На этой плате установлена и еще одна, на базе SoC HI3518, которая используется в IP-камерах.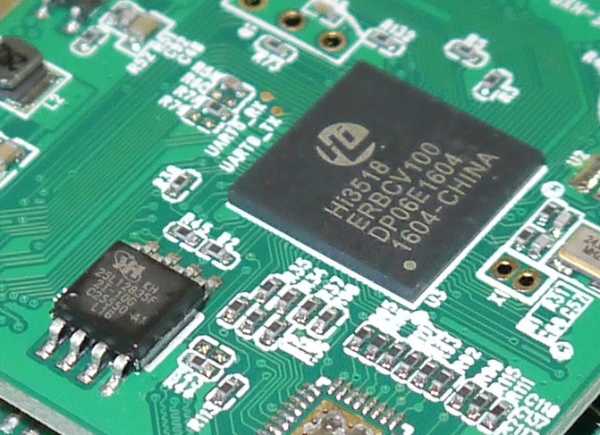 Маркировка на шлейфе к матрице, если кому то будет полезным.
Маркировка на шлейфе к матрице, если кому то будет полезным. И Wi-Fi антенна. Как ни странно, но не пленочная и не текстолитовая, как часто встречается в ТВ-боксах и прочих китайских девайсах с внутренней антенной.
И Wi-Fi антенна. Как ни странно, но не пленочная и не текстолитовая, как часто встречается в ТВ-боксах и прочих китайских девайсах с внутренней антенной.
Управление
Управление пылесосом осуществляется несколькими способами. На верхней части корпуса есть дисплей, который отображает время, режим работы, подключение к сети, уровень заряда АКБ и др. А под ним расположены 3 сенсорные кнопки. С их помощью можно отправить пылесос на базу для подзарядки, запустить уборку в автоматическом режиме или в режиме швабры.  Чтобы воспользоваться другими функциями — нужно использовать пульт. Это обыкновенный ИК пульт, работает от двух ААА батареек.
Чтобы воспользоваться другими функциями — нужно использовать пульт. Это обыкновенный ИК пульт, работает от двух ААА батареек. Кнопка Power включает/отключает пылесос, MODE — переключает мощность всасывания между silent и turbo, навигационная круглая клавиша со стрелками позволяет в ручном режиме управлять движением пылесоса.
Кнопка Power включает/отключает пылесос, MODE — переключает мощность всасывания между silent и turbo, навигационная круглая клавиша со стрелками позволяет в ручном режиме управлять движением пылесоса.  Под ней расположены кнопки режимов работы (авто, точка, парковка на базу и мытье пола). Две самые нижние кнопки — установка текущего времени и таймера начала уборки.
Есть и третий, самый интересный и выделяющий эту модель на фоне других, способ — через интернет, с помощью приложения.
Под ней расположены кнопки режимов работы (авто, точка, парковка на базу и мытье пола). Две самые нижние кнопки — установка текущего времени и таймера начала уборки.
Есть и третий, самый интересный и выделяющий эту модель на фоне других, способ — через интернет, с помощью приложения.
Камера и приложение
Для управления пылесосом со смартфона для начала нужно скачать фирменное приложение. В маркете ищется по названию Jisiwei. И тут нас ждут первые грабли.  Сначала я установил первое приложение. К нему пылесо привязался, но я никак не мог его подключить, делал все по инчтрукции и потратил минут 20 на безуспешные попытки. Только потом сообразил установить второе приложение — и тут дело пошло. Так что сразу ставим то, что нижнее по списку.
Теперь расскажу о процессе привязки робота к аккаунту и возможностях самого приложения. После установки нужно создать аккаунт. Тут все просто и понятно.
Сначала я установил первое приложение. К нему пылесо привязался, но я никак не мог его подключить, делал все по инчтрукции и потратил минут 20 на безуспешные попытки. Только потом сообразил установить второе приложение — и тут дело пошло. Так что сразу ставим то, что нижнее по списку.
Теперь расскажу о процессе привязки робота к аккаунту и возможностях самого приложения. После установки нужно создать аккаунт. Тут все просто и понятно. Далее открывается окно самого приложения.
Далее открывается окно самого приложения.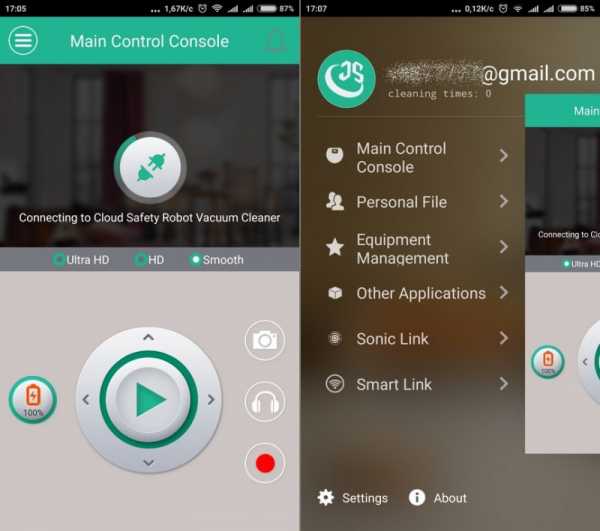 Это скриншоты еще старой версии приложения. Обзор был уже практически закончен, но производитель выпустил новую версию и в этой части мне пришлось многое переписывать и переснимать. На главном экране приложения расположены кнопки управления передвижением пылесоса и постановки его на зарядку, справа выбор режима (фото, запись видео, прослушка помещения), окно просмотра изображения с камеры и под ним 3 кнопки выбора качества.
В новой версии глобально ничего не изменилось, немного поменялись названия пунктов, значки и вместо 3 режимов качества осталось только 2.
Это скриншоты еще старой версии приложения. Обзор был уже практически закончен, но производитель выпустил новую версию и в этой части мне пришлось многое переписывать и переснимать. На главном экране приложения расположены кнопки управления передвижением пылесоса и постановки его на зарядку, справа выбор режима (фото, запись видео, прослушка помещения), окно просмотра изображения с камеры и под ним 3 кнопки выбора качества.
В новой версии глобально ничего не изменилось, немного поменялись названия пунктов, значки и вместо 3 режимов качества осталось только 2.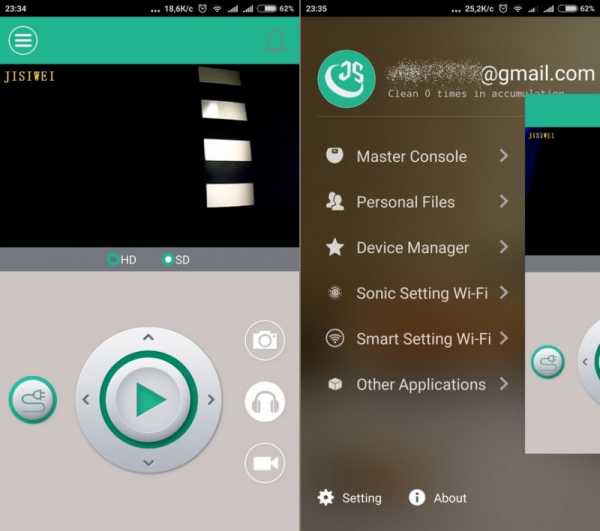 И вот именно из-за качества пришлось переснимать примеры, т.к. в предыдущей версии в любом из режимов фото и видео были в разрешении только 360р причем с очень высоким сжатием, а видео еще и с низкой частотой кадров, если не ошибаюсь что-то около 14. В общем была настоящая жуть. Если кто помнит самые-самые первые телефоны с камерами, которые еще даже «не умели» 640*480 — то вот здесь была примерно такая картина. Разве что светочувствительность выше. Я конечно подозревал, что это вина приложения скорее всего, но обзор то нужно писать о том, что имеем.
И вот именно из-за качества пришлось переснимать примеры, т.к. в предыдущей версии в любом из режимов фото и видео были в разрешении только 360р причем с очень высоким сжатием, а видео еще и с низкой частотой кадров, если не ошибаюсь что-то около 14. В общем была настоящая жуть. Если кто помнит самые-самые первые телефоны с камерами, которые еще даже «не умели» 640*480 — то вот здесь была примерно такая картина. Разве что светочувствительность выше. Я конечно подозревал, что это вина приложения скорее всего, но обзор то нужно писать о том, что имеем.  Но буквально несколько дней назад вышла новая версия, пропала одна кнопка, а оставшиеся теперь позволяют выбирать между режимами 360р и HD (720р). Да и в самом низком режиме работы качество значительно поправили.
Теперь о процессе привязки к аккаунту. Делается это довольно необычным способом. В пункте Device manager нужно нажать в правом верхнем углу значок сканирования QR, перевернуть пылесос, отсканировать код и придумать название роботу. Кстати, каждый пылесос имеет уникальный номер и логин/пароль для авторизации. И если он уже привязан к другому аккаунту — к своему вы его уже не прицепите до тех пор, пока не отвяжете от старого.
Теперь нужно пылесосу дать доступ к интернету. Т.е. сообщить ему имя и пароль вашей беспроводной точки доступа. Делается это довольно странным способом — с помощью свуковых сигналов, издаваемых смартфоном.
Для этого переходим в пункт Sonic setting Wi-Fi. Приложение просит убедиться в том, что на пылесосе моргает синий светодиод. При этом и далее все действия что и как делать сопровождаются голосовыми подсказками на английском языке.
Но буквально несколько дней назад вышла новая версия, пропала одна кнопка, а оставшиеся теперь позволяют выбирать между режимами 360р и HD (720р). Да и в самом низком режиме работы качество значительно поправили.
Теперь о процессе привязки к аккаунту. Делается это довольно необычным способом. В пункте Device manager нужно нажать в правом верхнем углу значок сканирования QR, перевернуть пылесос, отсканировать код и придумать название роботу. Кстати, каждый пылесос имеет уникальный номер и логин/пароль для авторизации. И если он уже привязан к другому аккаунту — к своему вы его уже не прицепите до тех пор, пока не отвяжете от старого.
Теперь нужно пылесосу дать доступ к интернету. Т.е. сообщить ему имя и пароль вашей беспроводной точки доступа. Делается это довольно странным способом — с помощью свуковых сигналов, издаваемых смартфоном.
Для этого переходим в пункт Sonic setting Wi-Fi. Приложение просит убедиться в том, что на пылесосе моргает синий светодиод. При этом и далее все действия что и как делать сопровождаются голосовыми подсказками на английском языке. 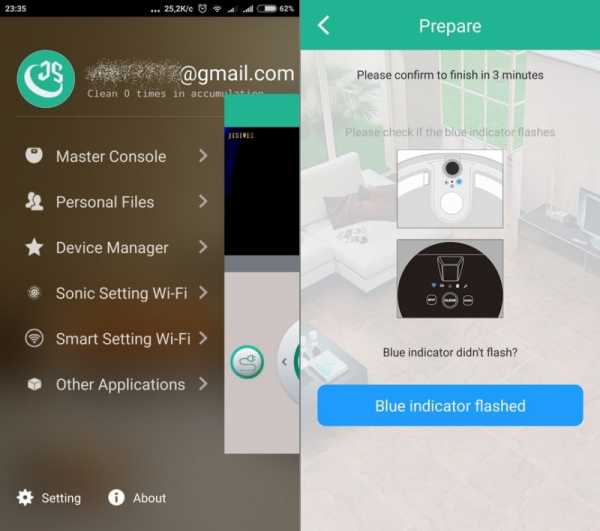 Затем вводим пароль от точки доступа, жмем синюю кнопку. Устанавливаем максимальную громкость на телефоне, подносим его поближе к пылесосу. Микрофон находится на выступе, где установлена и сама камера.
Затем вводим пароль от точки доступа, жмем синюю кнопку. Устанавливаем максимальную громкость на телефоне, подносим его поближе к пылесосу. Микрофон находится на выступе, где установлена и сама камера. 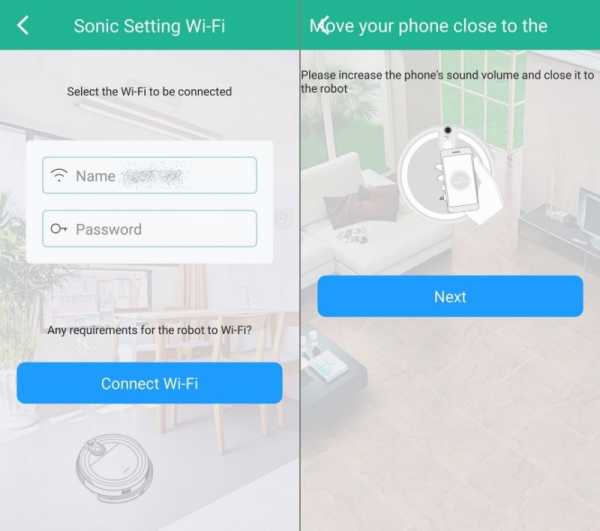 Теперь жмем круглую синюю кнопку, телефон начинает пищать звуками разной частоты, а пылесос внимательно это слушает и пытается понять )
Теперь жмем круглую синюю кнопку, телефон начинает пищать звуками разной частоты, а пылесос внимательно это слушает и пытается понять ) 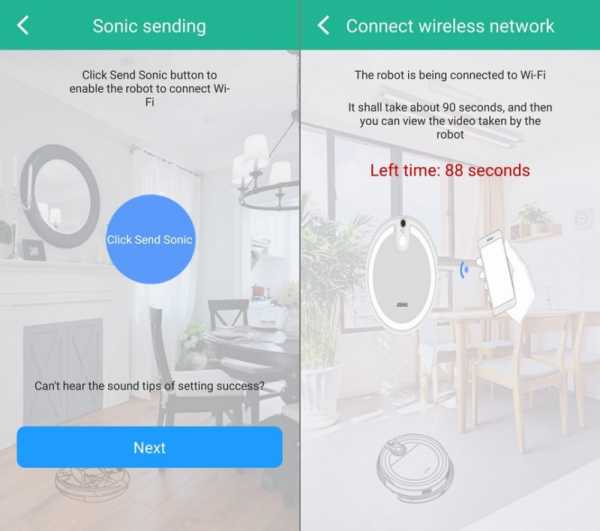 По завершению данной процедуры он имеет доступ в интернет, а вы со своего смартфона можете контролировать обстановку в квартире, наблюдать за процессом уборки или управлять пылесосом из любой точки, где есть интернет.
По завершению данной процедуры он имеет доступ в интернет, а вы со своего смартфона можете контролировать обстановку в квартире, наблюдать за процессом уборки или управлять пылесосом из любой точки, где есть интернет.
Управление пылесосом осуществляется стрелками. Можно прокатиться по квартире и посмотреть что происходит в разных комнатах. В этом и есть основное преимущество перед стационарной камерой. Если нажать на центральную кнопку со значком Play — запустится процесс уборки. Переключатель HD/SD устанавливает разрешение видео между 360р и 720р.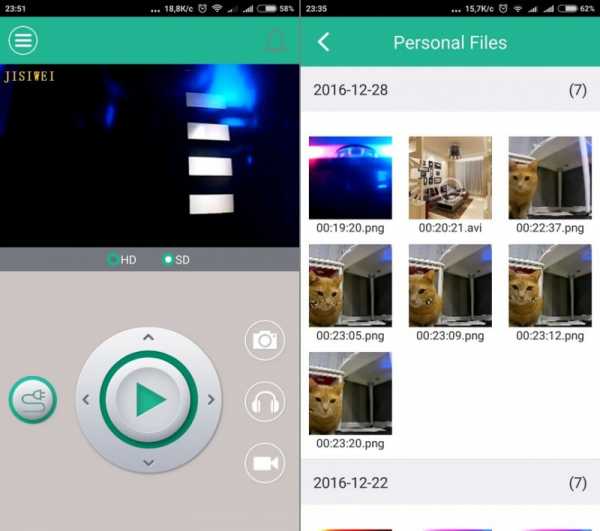 При нажатии на значок с фотоаппаратом сохраняется снимок, с камерой — записывается видео, с наушниками — включается звук с микрофона пылесоса, но при этом на видео он не пишется. По крайней мере в текущей версии приложения. Все отснятые материалы доступны в разделе Personal Files.
Вот примеры снимков. Разрешение 360р, освещение хорошее, включены все лампы.
При нажатии на значок с фотоаппаратом сохраняется снимок, с камерой — записывается видео, с наушниками — включается звук с микрофона пылесоса, но при этом на видео он не пишется. По крайней мере в текущей версии приложения. Все отснятые материалы доступны в разделе Personal Files.
Вот примеры снимков. Разрешение 360р, освещение хорошее, включены все лампы. Те же условия, HD.
Те же условия, HD. HD, но основной свет выключен, горит только лампа над столом.
HD, но основной свет выключен, горит только лампа над столом. Камера оказалась хоть и не высокого качества, но при слабом освещении вполне можно все рассмотреть. Вот эта лампа с другого ракурса. Баланс белого «не попал», реально она нейтральная, ближе к теплому.
Камера оказалась хоть и не высокого качества, но при слабом освещении вполне можно все рассмотреть. Вот эта лампа с другого ракурса. Баланс белого «не попал», реально она нейтральная, ближе к теплому. 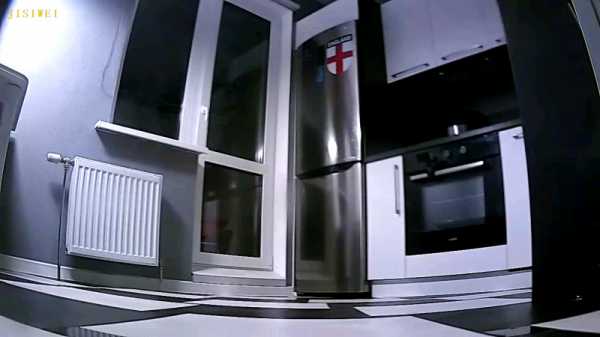 Примеры видео с камеры:
360p, хорошее освещение
Примеры видео с камеры:
360p, хорошее освещение
Ради интереса проверил угол обзора по горизонтали — немного не дотягивает до 90 градусов.
Помимо записи и снимков в ручном режиме предусмотрено и оповещение владельца с помощью уведомлений на смартфоне. Но вот тут не все так гладко. А точнее говоря, вообще не понятно каким местом думали люди, которые трудились надо реализацией этой функции. Но после того, как сделали — хотя бы сами все проверили.
Для активации этого режима нужно перейти в настройки (значок шестеренки и надпись Settings внизу).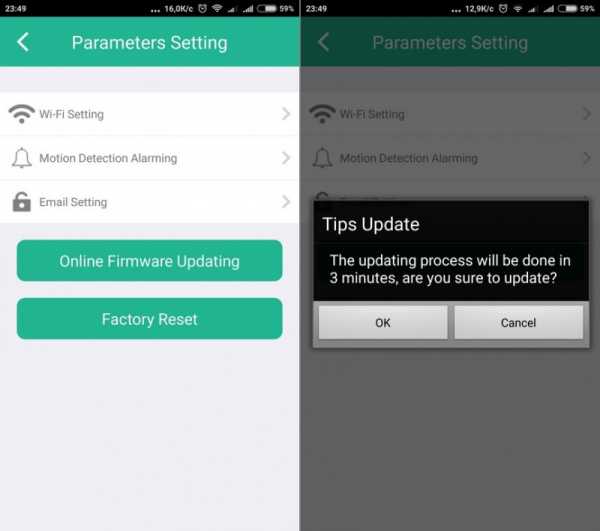 В настройках не запутаешься и без перевода, все очевидно. Настройки Wi-Fi, Определение движения в кадре, настройки почты (для отправки при сработке), обновление прошивки и сброс всех настроек. Я пробовал обновить прошивку, но так и не понял удалось ли. Пылесос действительно пару минут ни на что не реагировал, было похоже что все-таки пошел процесс, а не понял успешно ли, т.к. не нашел где посмотреть версию текущей прошивки самого пылесоса.
В настройках не запутаешься и без перевода, все очевидно. Настройки Wi-Fi, Определение движения в кадре, настройки почты (для отправки при сработке), обновление прошивки и сброс всех настроек. Я пробовал обновить прошивку, но так и не понял удалось ли. Пылесос действительно пару минут ни на что не реагировал, было похоже что все-таки пошел процесс, а не понял успешно ли, т.к. не нашел где посмотреть версию текущей прошивки самого пылесоса.
Настройки Wi-Fi.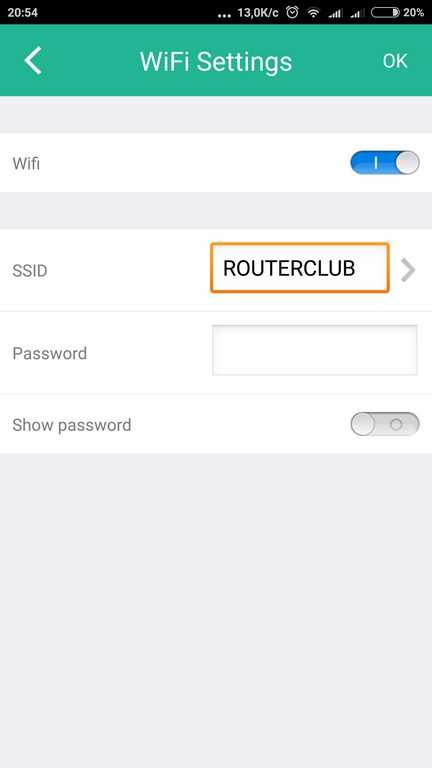 Включаем опцию определения движения и устанавливаем чувствительность.
Включаем опцию определения движения и устанавливаем чувствительность.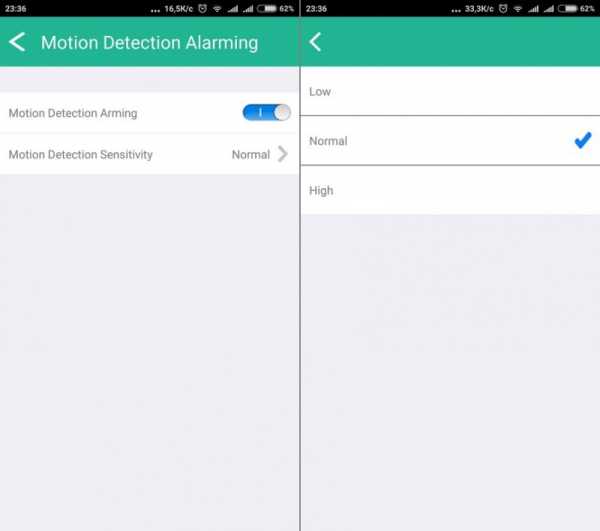 Движение в кадре он действительно определяет и уведомления на телефон приходят.
Движение в кадре он действительно определяет и уведомления на телефон приходят. Но это все по сути бесполезно в текущей реализации. Во-первых, если пылесос стоит на базе — то 3/4 обзора закрыто корпусом базы.
Но это все по сути бесполезно в текущей реализации. Во-первых, если пылесос стоит на базе — то 3/4 обзора закрыто корпусом базы. И это при условии, что базу вы расположили не у стены, а направили например на входную дверь. Да, можно, конечно, пылесос поставить в нужное место без базы, в таком случае обзор ничто закрывать не будет. На пару дней заряда хватит. А если вы хотите в отпуск на неделю-другую? Еще и следить за уровнем заряда и периодически гонять его на базу?
А если поставить базу у стены — наблюдать он будет только за бликами от светодиодов на стене и без остановки слать уведомления о сработке.
И это при условии, что базу вы расположили не у стены, а направили например на входную дверь. Да, можно, конечно, пылесос поставить в нужное место без базы, в таком случае обзор ничто закрывать не будет. На пару дней заряда хватит. А если вы хотите в отпуск на неделю-другую? Еще и следить за уровнем заряда и периодически гонять его на базу?
А если поставить базу у стены — наблюдать он будет только за бликами от светодиодов на стене и без остановки слать уведомления о сработке.  Во-вторых, даже если вам нужно поставить на охрану пылесос хотя бы на сутки, даже в удобное место, где база не закроет обзор — все равно он вам будет бесконечно слать уведомления о движении. Видели на примерах видео в правом верхнем углу синий блик, который появляется раз пару секунд? Это отражение светодиода от внутренней поверхности защитного стекла камеры. Устранить можно, но нужно разобрать пылесос, и вокруг светодиода чем-нибудь заклеить пространство. В таком случае работать будет, но требуется разборка и доработка.
Также можно настроить и отправку уведомлений (или даже самих фото, точно не понял) на почту.
Во-вторых, даже если вам нужно поставить на охрану пылесос хотя бы на сутки, даже в удобное место, где база не закроет обзор — все равно он вам будет бесконечно слать уведомления о движении. Видели на примерах видео в правом верхнем углу синий блик, который появляется раз пару секунд? Это отражение светодиода от внутренней поверхности защитного стекла камеры. Устранить можно, но нужно разобрать пылесос, и вокруг светодиода чем-нибудь заклеить пространство. В таком случае работать будет, но требуется разборка и доработка.
Также можно настроить и отправку уведомлений (или даже самих фото, точно не понял) на почту. 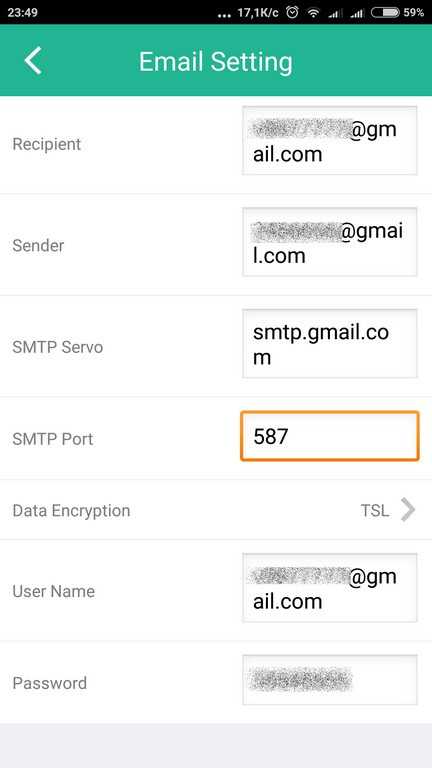 Я попробовал и другие порты прописать и перебрал все варианты во вкладке «шифрование», но ничего пришло. Скорее всего дело в самих гугловских ящиках, но раз уж функция и так бесполезная, интерес к настройке у меня пропал, я не стал больше возиться с настройкой почты.
Я попробовал и другие порты прописать и перебрал все варианты во вкладке «шифрование», но ничего пришло. Скорее всего дело в самих гугловских ящиках, но раз уж функция и так бесполезная, интерес к настройке у меня пропал, я не стал больше возиться с настройкой почты.
Как убирает. Режимы работы.
А теперь проверим как он справляется с его основным предназначением — уборкой.
Пылесос имеет несколько алгоритмов движения по комнате и при запуске в автоматическом режиме он сам выбирает как ему двигаться и периодически меняет эти алгоритмы. Карту помещения он не строит. Если же что-то просыпалось — можно в режиме Spot локально убрать мусор. Пылесос по спирали проедет от центра, затем вернется.
Если же что-то просыпалось — можно в режиме Spot локально убрать мусор. Пылесос по спирали проедет от центра, затем вернется. В начале был запущен в турбо режиме
В начале был запущен в турбо режиме
 Оба пылесоса имеют центральную вращающуюся щетку, 2 боковые щетки, полукруглый контейнер для мусора примерно одинакового объема, крепящийся сзади, оба познают внешний мир с помощью ИК датчиков и не строят карты помещений. Но у S+ центральная щетка заметно шире, что теоретически позволит ему убрать ту же площадь за меньшее количество проходов, а также возможность установки микрофибровой тряпочки для мытья пола.
Оба пылесоса имеют центральную вращающуюся щетку, 2 боковые щетки, полукруглый контейнер для мусора примерно одинакового объема, крепящийся сзади, оба познают внешний мир с помощью ИК датчиков и не строят карты помещений. Но у S+ центральная щетка заметно шире, что теоретически позволит ему убрать ту же площадь за меньшее количество проходов, а также возможность установки микрофибровой тряпочки для мытья пола. В габаритах обозреваемая модель побольше модели А4, да и выглядит более «навернуто». А4 — неприметная безотказная рабочая лошадка на фоне JISIWEI S+.
В габаритах обозреваемая модель побольше модели А4, да и выглядит более «навернуто». А4 — неприметная безотказная рабочая лошадка на фоне JISIWEI S+. Уборка
Поскольку можели конструктивно очень схожи, я не стал утсраивать между ними соревнование, кто больше мусора привезет, а решил проверить насколько хорошо убирает именно обозреваемая модель. После обычной уборки он привез примерно столько же и такого же мусора, как обычно это делает А4. В обычном режиме время работы составляет 2 часа 4 минуты. Несмотря на заниженную емкость АКБ пылесос работает заявленное время. В основном это шерсть кота, пыль, мелкий мусор. Ну и я специально «подкормил» его семечками ))
В основном это шерсть кота, пыль, мелкий мусор. Ну и я специально «подкормил» его семечками ))  Здесь ничего необычно, результат ожидаемый. Я обратил внимание, что на щетку намоталось значительно меньше мусора. Попало немного ниток, но практически не было шерсти, в отличие от щетки А4 после аналогичной уборки.
Здесь ничего необычно, результат ожидаемый. Я обратил внимание, что на щетку намоталось значительно меньше мусора. Попало немного ниток, но практически не было шерсти, в отличие от щетки А4 после аналогичной уборки.  Все дело в специальной «расческе», расположенной на контейнере, которая во время уборки постоянно снимает мусор со щетки. Очевидный плюс дает не очевидный минус. Из-за нее пылесос громче тарахтит во время уборки.
Все дело в специальной «расческе», расположенной на контейнере, которая во время уборки постоянно снимает мусор со щетки. Очевидный плюс дает не очевидный минус. Из-за нее пылесос громче тарахтит во время уборки.
Далее я решил устроить уборку с замерами, но не на ламинате, а на рифленой плитке, да еще и со швами. Ковров у меня дома нет, поэтому выбрал кухню с плиткой как площадку с самым сложным для уборки покрытием.
Итак, тестовый мусор. Скорлупа от семечек, 2,5 г. Чай листовой, 2,49 г.
Чай листовой, 2,49 г. Кофе молотый, 2,48 г.
Кофе молотый, 2,48 г. Обрывки картона, 0,99 г.
Обрывки картона, 0,99 г. Мелкий песок, 5,16 г.
Мелкий песок, 5,16 г. Хлопья овсяные, 3,99 г.
Хлопья овсяные, 3,99 г. Итого: 17,61 г.
Итого: 17,61 г.  Кажется, не много. Но на самом деле если рассыпать это все сразу на пол небольшой комнаты — получится настоящий свинарник, в реальной жизни еще нужно постараться так загадить помещение.
Кажется, не много. Но на самом деле если рассыпать это все сразу на пол небольшой комнаты — получится настоящий свинарник, в реальной жизни еще нужно постараться так загадить помещение.  Запускаем пылесос в автоматическом режиме, на минимальной мощности.
Запускаем пылесос в автоматическом режиме, на минимальной мощности.
 В общем он собрал практически все.
В общем он собрал практически все.  Я насыпал мусор вокруг ножек стола, ожидаемо все собрать в тех местах было физически не реально.
Я насыпал мусор вокруг ножек стола, ожидаемо все собрать в тех местах было физически не реально.  Это скорее для демонстрации того, что останется и куда он подлезть не сможет.
Это скорее для демонстрации того, что останется и куда он подлезть не сможет. Ну а здесь можно было бы и немного лучше. Все, конечно, не убрал бы, но еще пару хлопьев щетками достал бы.
Ну а здесь можно было бы и немного лучше. Все, конечно, не убрал бы, но еще пару хлопьев щетками достал бы.  Вокруг этой ножки он собрал все, но умудрился что-то размазать по плитке, причем я так и не понял что. Возможно наехал на какие-то капли и налепил песка на колесо?
Вокруг этой ножки он собрал все, но умудрился что-то размазать по плитке, причем я так и не понял что. Возможно наехал на какие-то капли и налепил песка на колесо? Вот, что оказалось в контейнере. И результат на весах.
Вот, что оказалось в контейнере. И результат на весах.  Собрал даже больше, чем я насыпал. Это говорит лишь об одном, что эксперимент не был чистым в прямом смысле слова. Я предварительно конечно убирал пол, но видимо щеткой не смел хорошо мусор из швов между плитками, но скорее всего наибольшее количество «лишнего» мусора он выгреб боковыми щетками, когда пылесосил вдоль кухни. Они как раз проходят между полом и мебелью. А еще я не мыл пол паровой шваброй, т.к. для следующего теста мне нужна была грязная плитка. Но на видео, да и в целом видно, что справился с уборкой он хорошо. Теперь посмотрим, как он моет пол.
Собрал даже больше, чем я насыпал. Это говорит лишь об одном, что эксперимент не был чистым в прямом смысле слова. Я предварительно конечно убирал пол, но видимо щеткой не смел хорошо мусор из швов между плитками, но скорее всего наибольшее количество «лишнего» мусора он выгреб боковыми щетками, когда пылесосил вдоль кухни. Они как раз проходят между полом и мебелью. А еще я не мыл пол паровой шваброй, т.к. для следующего теста мне нужна была грязная плитка. Но на видео, да и в целом видно, что справился с уборкой он хорошо. Теперь посмотрим, как он моет пол. Мытье пола
Честно говоря, на эту функцию больших надежд я изначально и не возлагал, т.к. эту плитку и руками не просто отмыть. Я для этого и купил паровую швабру, которая видна в углу на некоторых видео.  Для проверки я разлил чай, молоко и капнул кетчупа. И немного подождал, чтобы часть брызг подсохла.
Для проверки я разлил чай, молоко и капнул кетчупа. И немного подождал, чтобы часть брызг подсохла.  Кроме того, как и говорил чуть ранее, я специально не мыл пол паровой шваброй, чтобы посмотреть сможет ли он хоть немного отмыть застаревшую грязь.
Кроме того, как и говорил чуть ранее, я специально не мыл пол паровой шваброй, чтобы посмотреть сможет ли он хоть немного отмыть застаревшую грязь. На тряпочку я предварительно капнул пару капель средства для мытья пола (не знаю, поможет ли хоть как-то).
На тряпочку я предварительно капнул пару капель средства для мытья пола (не знаю, поможет ли хоть как-то). Обильно смочил водой, сколько смогла удержать сама ткань, и установил на пылесос.
Обильно смочил водой, сколько смогла удержать сама ткань, и установил на пылесос.
 Старая осталась в неизменном виде.
Старая осталась в неизменном виде. Тряпочка собрала приличную часть загрязнения.
Тряпочка собрала приличную часть загрязнения.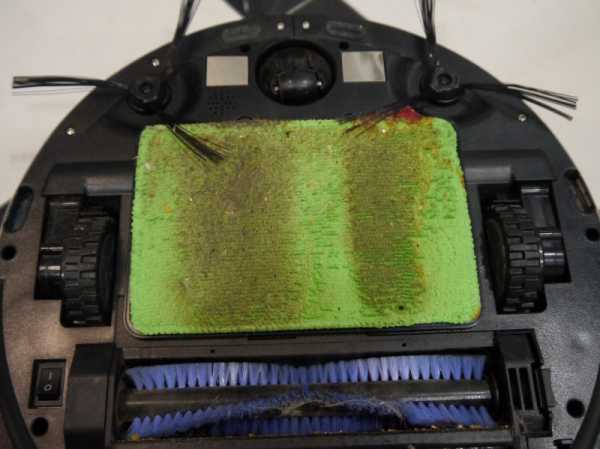 После быстрой промывки я ее снова смочил и установил на пылесос.
После быстрой промывки я ее снова смочил и установил на пылесос.  И запустил заново. Опять минут 20 и тряпочка сухая и грязная.
И запустил заново. Опять минут 20 и тряпочка сухая и грязная.  Можно, конечно, запустить его еще раз, но выводы очевидны. В режиме швабры он очень медленно расходует батарею, т.к. все 3 щетки и турбина не вращаются, энергия расходуется только на передвижение.
Можно, конечно, запустить его еще раз, но выводы очевидны. В режиме швабры он очень медленно расходует батарею, т.к. все 3 щетки и турбина не вращаются, энергия расходуется только на передвижение. Со свежей грязью он справляется еще не плохо, но ему не хватает воды, раз в 20-30 минут тряпочку придется смачивать. Застаревшую грязь, особенно с рифленой плитки ему отмыть не по силам (но тут и человеку с тряпкой придется хорошо постараться, меня спасает паровая швабра). Где эта функция может быть полезная — так это освежить от пыли относительно чистый гладкий ламинат или плитку. Если у вас, допустим, упал пакет с кетчупом и он растекся по полу — лучше собрать его вручную.
Со свежей грязью он справляется еще не плохо, но ему не хватает воды, раз в 20-30 минут тряпочку придется смачивать. Застаревшую грязь, особенно с рифленой плитки ему отмыть не по силам (но тут и человеку с тряпкой придется хорошо постараться, меня спасает паровая швабра). Где эта функция может быть полезная — так это освежить от пыли относительно чистый гладкий ламинат или плитку. Если у вас, допустим, упал пакет с кетчупом и он растекся по полу — лучше собрать его вручную.Заключение. Настало время подводить итоги. Безусловно, вещь интересная. Помимо стандартных преимуществ обычных роботов-пылесосов, таких как поддержание чистоты в квартире без затрачивания дополнительных усилий, экономия времени на уборке и так далее, Jisiwei S+ еще и позволяет удаленно контролировать обстановку в квартире. В отличие от установленной стационарно IP-камеры, пускай даже поворотной, мы имеем возможность перемещаться по квартире и наблюдать за интересующим нас участком. Кроме того, по задумке производителя робот должен еще и отслеживать движение в кадре, а в случае обнаружения уведомить об этом хозяина. Отличная задумка и функция, но плохая реализация. Практически неработоспособна из коробки и частично возможно использование после небольшой доработки (мешает блик на стекле, подробно об этом в разделе о камере, если кто-то пропустил по тексту). Если же функционал камеры наблюдения вас абсолютно не заинтересовал — я бы порекомендовал Ilife A4, о котором я уже упоминал по ходу текущего обзора. C момента написания обзора этот пылесос постоянно эксплуатируется и прошел проверку временем. Работает отлично и безотказно.
Купон: JISIWEIS+ ($259.99) действителен до 31.1.2017
Котейка, вид из пылесоса )
Товар предоставлен для написания обзора магазином. Обзор опубликован в соответствии с п.18 Правил сайта.
mysku.ru
Серийный робот-пылесос научился строить карту помещений

Roomba 980
Фотография: iRobot
Компания iRobot представила новую модель популярной серии роботов-пылесосов Roomba 980. Одна из новых функций устройства заключается в умении робота строить карту помещений и ориентировать по ней, сообщает IEEE Spectrum.
Для построения карты робот использует алгоритм, обрабатывающий изображение с встроенной камеры. Результат распознавания границ предметов сопоставляется с данными датчиков расстояния. При помощи построенной карты Roomba ориентируется в пространстве, отправляется на подзарядку и возвращается на место, с которого необходимо продолжить уборку. Благодаря навигации пылесос может самостоятельно убирать квартиру или этаж дома.
Также новая модель умеет взбираться на толстые ковры, не падает с лестниц, автоматически повышает в несколько раз мощность всасывания на мягких покрытиях и после основной уборки еще раз проходит помещение по периметру, убирая пыль из углов и у стен. Управляется Roomba 980 приложением со смартфона, в котором можно как запустить уборку нажатием кнопки, так и задать расписание, по которому пылесос будет включаться. В продажу пылесос поступит 17 сентября по цене 899,99 долларов США.
Ранее пылесос с технологией одновременного перемещения и построения карты (SLAM) создала Neato Robotics. Также технология используется в исследовательских работах и самодельных устройствах. Например, при помощи подобной технологии исследователи из Цюрихского университета создали автономную систему стабилизации и вынужденной посадки для квадрокоптеров.
nplus1.ru
Робот-пылесос iClebo Omega:
Производитель завлекает покупателя следующими словами: «iClebo Omega — модель нового поколения Yujin Robot. Она совмещает в себе непревзойденную мощность, улучшенные алгоритмы навигации, технологию глубокой чистки углов и великолепный дизайн».
Содержание:
Видеообзор
Для начала предлагаем посмотреть наш видеообзор робота-пылесоса iClebo Omega:
Теперь давайте взглянем на спецификации устройства.
Паспортные характеристики, комплект поставки и цена
| Название модели/серии | iClebo Omega White |
| Код модели | YCR-M07-20 |
| Кинематическая система | Два ведущих колеса и фиксированный опорный ролик |
| Способ сбора пыли | Инерционное перемещение и вакуумная фильтрация |
| Пылесборник | Одно отделение |
| Основная щетка | Одна с лопастями |
| Боковые щетки | Две |
| Дополнительно | Протирочная насадка с салфеткой из микроволокна |
| Режимы очистки | Автоматический с навигацией, максимальный с навигацией, локальный, ручной, ежедневная уборка по таймеру |
| Скорость движения | 35 см/с |
| Уровень шума | 68 дБ |
| Датчики препятствий | Механический передний/боковой бампер, ИК-датчики приближения и перепада высоты |
| Датчики ориентации | ИК-датчики поиска базы, верхняя видеокамера, гироскоп, датчик вращения опорного ролика и т. д. |
| Управление на корпусе | Сенсорные кнопки |
| Дистанционное управление | ИК-пульт ДУ |
| Оповещение | Светодиодная индикация и звуковые сигналы |
| Время автономной работы | 80 мин. (60 мин. с увеличенной мощностью вентилятора) |
| Время зарядки | 180 мин. |
| Способ зарядки | На зарядной базе с автоматическим возвратом или от блока питания |
| Источник питания | Литий-ионный аккумулятор, 14,4 В, 4400 мА·ч |
| Масса | 3,1 кг |
| Размеры (Ш×Д×В) | 34×35×8,7 мм |
| Особенности | Фильтр HEPA E11, датчик обнаружения мусора, режим преодоления препятствий высотой до 15 мм, создание карты и выбор оптимального маршрута уборки, магнитный ограничитель движения, бесколлекторный двигатель вентилятора |
| Комплект поставки |
|
| Ссылка на сайт производителя | iclebo.com.ru |
| Средняя цена | T-14143499 |
| Розничные предложения | L-14143499-10 |
Внешний вид
Пылесос в плане имеет необычную для роботов-пылесосов форму овоида.
Уширенная спереди форма корпуса позволила вынести боковые щеточки вперед и в стороны, что, по идее, должно улучшить качество уборки в углах. Края снизу скошены, что помогает роботу преодолевать препятствия.
Переход с боков вверх также сглажен, но чтобы снизить вероятность того, что пылесос будет застревать под препятствиями с небольшим просветом, на верхушке бампера есть невысокий бортик. Этот выступ является самой высокой частью пылесоса и, соответственно, определяет минимальный просвет препятствия (например, дивана), под которое пылесос еще может забраться. Согласно нашим измерениям этот просвет равен 91 мм (приведем и полученные значения ширины и длины — 345 и 354 мм, соответственно). Верхняя часть корпуса выполнена из пластика с гладким белым и относительно устойчивым к повреждениям покрытием. Вариант немаркий, а светлый сверху цвет корпуса облегчает поиск робота в темных закоулках квартиры, когда он по какой-то причине не вернется на базу, также робота проще заметить боковым зрением, когда он путается под ногами, а значит, с меньшей вероятностью на него можно наступить. На сайте производителя представлен еще один вариант цветового оформления модели с золотистым бампером и темным верхом.
На верхней панели ближе к передней части корпуса находится контрольная панель с тремя емкостными сенсорными кнопками, светодиодным сегментным дисплеем и пиктограммами режима/состояния, подсвечиваемыми светодиодами.
В едином блоке с контрольной панелью расположена и направленная вверх видеокамера, а также ИК-приемник пульта ДУ. Контрольную панель прикрывает пластина, выполненная, судя по идеальной гладкости и отсутствию царапин, из минерального стекла, при этом вся поверхность этой пластины, кроме глазков камеры и датчика представляет собой полупрозрачное зеркало, что зачастую осложняет считывание показаний индикаторов из-за отражающихся источников света и т.д. Также заметим, что индикаторы-иконки режимов в верхнем ряду очень похожи на кнопки в нижнем ряду, что временами слегка запутывает. Нижняя часть корпуса изготовлена из немаркого черного пластика с матовой поверхностью. Всю переднюю половину корпуса огибает подпружиненный бампер с небольшим ходом. За ним есть оптические датчики столкновения, реагирующие на перемещение бампера. Бампер имеет лаковое покрытие по серебристой краске. Смотрится красиво, но, как показали тесты, при столкновениях с предметами обстановки бампер может процарапываться до белой основы, что портит эту красоту. Передняя часть бампера закрыта плотно тонированным окошком из прозрачного пластика. За окошком — ИК-датчики приближения к препятствию, определения базы и возможно, дублирующие прием сигналов с пульта ДУ. Под окошком на бампер наклеена узкая полоска из жесткой резины, которая предохраняет мебель от царапин при контакте с роботом. Но, к сожалению, не все препятствия расположены именно на высоте этой полоски.
Крышка на верхней панели скрывает отсек пылесборника.
На внутренней стороне крышки приведены описания ошибок. На правом боку ближе к задней части расположены разъем питания и клавиша выключения робота.
Сзади — воздушная выпускная решетка
Перевернув пылесос вверх днищем, мы увидим две контактные площадки для зарядки на базе, передний неповоротный ролик, две боковые щетки, отсек с основной щеткой, два ведущих колеса на подпружиненных рычагах и крышку отсека АКБ.
Есть и ИК-датчики перепада высоты — это три пары излучатель-приемник на днище в передней части близко к краю. Благодаря этим датчикам пылесос не падает со ступенек. Передний датчик из этого набора также используется для порогового определения высоты препятствия. Ось переднего ролика вращается в двух шариковых подшипниках.
Коричневый диск, закрепленный с одного торца ролика, — это часть магнитного датчика вращения (одометра) с датчиками Холла.
В помещении робот ориентируется с помощью верхней камеры с обзором 130 градусов, также для ориентации и диагностики состояния используется информация с гироскопа, одометра, датчиков скорости вращения и вывешивания ведущих колес. Ведущие колеса расположены примерно на одном условном диаметре окружности, в которую можно вписать обводы корпуса. Такая кинематическая схема позволяет роботу совершать разворот на месте с минимальным изменением границ, занимаемой роботом площади. Однако в данном случае оси колес расположены под углом друг к другу, что увеличивает нагрузку на моторы приводов из-за неизбежного бокового проскальзывания при движении. Указанная производителем скорость движения равна 35 см/с. Ход шарниров в точке центров ведущих колес достигает 29 мм, диаметр колес 70 мм, поэтому робот без особых проблем преодолевает встречающиеся препятствия небольшой глубины и высоты. Заявлено, что робот может преодолевать препятствия (пороги) высотой до 15 мм (при выборе специального режима). Однако расстояние от пола до нижней точки бампера пылесоса равно 18 мм, что в теории немного увеличивает реальную максимальную высоту преодолеваемого препятствия.
При уборке две передние щеточки подгребают мусор к центру, затем основная щетка поднимает его с пола. Часть мусора по центру щетки может по инерции забрасываться в пылесборник, но основная задача по перемещению мусора в пылесборник возложена на поток воздуха, прокачиваемого вентилятором через отсек основной щетки, пылесборник и фильтр на выходе пылесборника. Кстати, в воздуховоде от основной щетки к пылесборнику установлен оптический датчик, видимо, для оценки количества мусора в засасываемом воздухе. Отметим необычную конфигурацию боковых щеток — пять пучков длинной щетины и пять коротких пучков. Щетина относительно жесткая. Тесты показали, что боковые щеточки работают эффективно и долго не теряют свою форму. При обслуживании пылесоса боковые щетки просто с усилием снимаются с осей, никакие инструменты для этого не нужны. Правая и левая щеточка отличаются направлением пучков щетины, а различить их помогает цвет щетины, также посадочные гнезда исключают неправильную установку щеток.
Рамка на пластиковых защелках удерживает основную щетку на месте. Основная щетка представляет собой шесть гибких лепестков из тонкой резины, закрепленных на пластиковом валу относительно большого диаметра.
На одном торце основной щетки в упругой антивибрационной втулке установлен шариковый подшипник.
Юбка втулки утоплена в гильзу на торце щетки, что, как мы надеемся, исключит попадание грязи и волос в сепаратор подшипника. Дополнительно на торцах щетки установлены фетровые шайбы, видимо, чтобы оградить вращающиеся части подшипника и привода от попадания мусора. Блок щетки установлен на рычажном шарнире, поэтому при движении робота сохраняется хорошее прилегание щетки к полу даже если он не очень ровный.
Корпус пылесборника выполнен из слегка тонированного прозрачного пластика, что позволяет оценить его заполненность просто открыв крышку на роботе.
У пылесборника есть откидывающаяся ручка для переноси, а случайное выпадение мусора предотвращает шторка из жесткого прозрачного пластика, шарнирно закрепленная на входном отверстии. Для опустошения пылесборника нужно отсоединить фильтр с желтой пластиковой рамкой. Фильтр сертифицирован как HEPA E11. Чтобы крупный мусор не забивал складки фильтра, он закрыт съемной пластиковой сеточкой.
Упругие прокладки в самом пылесборнике перед фильтром, а также в отсеке пылесборника исключают паразитный подсос воздуха. Вентилятора в самом пылесборнике нет, поэтому пылесборник можно мыть под водой, но только сам корпус (и обязательно хорошо его высушить перед установкой на место), мыть фильтр HEPA запрещено. Для очистки фильтра рекомендуется использовать комплектную кисточку и/или обычный пылесос.
Для дополнительной очистки гладких полов на днище за основной щеткой можно закрепить специальную протирочную насадку, на которую на липучке прикрепляется махровая салфетка из микрофибры (ее можно увлажнить), начисто протирающая поверхность.
При установке этой насадки робот автоматически выбирает режим влажной уборки, в котором отключается режим преодоления препятствий, то есть максимальная высота преодолеваемого препятствия снижается до 5 мм. Сделано это для того, чтобы робот с протирочной насадкой не заезжал на ковры. Салфеток в комплекте две, как минимум они различаются цветом ворсистой части.
В данном роботе установлена литий-ионная аккумуляторная батарея. Собрана она из 8-ми элементов популярного типоразмера 18650 производства Samsung SDI емкостью в 2200 мА·ч каждый. Заменить батарею может сам пользователь, вооружившись только крестовой отверткой среднего размера.
В штатном режиме робот заряжается на базе.
Корпус базы изготовлен из черного матового пластика. Спереди есть узкое окошко из тонированного прозрачного пластика, за которым, видимо, находятся парковочные и отпугивающие ИК-маячки.
Сзади у базы есть ниша, где можно скрыть излишки кабеля (его длина 1,5 м) от адаптера питания (бухту нужно поместить внутрь, а не как на фотографии).
Основание базы большое по площади, и снизу на него наклеены три резиновые площадки.
Сочетание указанных особенностей препятствует непредвиденному перемещению базы при маневрах пылесоса.
К пылесосу прилагается небольшой ИК-пульт ДУ. Его корпус изготовлен из черного пластика с матовой поверхностью. Обозначения кнопок читаются хорошо.
Продается робот упакованным в не очень большую строго оформленную коробку с пластиковой ручкой.
К дополнительным аксессуарам, входящим в комплект поставки, относятся запасной фильтр, кисточка-гребенка и ограничительная лента.
Локализация для использования в России выполнена на хорошем уровне — на русском языке напечатанное руководство и наклейки на пылесосе и аксессуарах, есть русская версия сайта, посвященная роботам iClebo, где, помимо описания находятся и файлы руководств на русском языке.
Предупредим, что этот пылесос недопустимо использовать во влажном помещении или на поверхностях с разлитыми жидкостями. После контакта пылесоса с жидкостями в лучшем случае придется долго очищать его от налипшего слоя пыли, в худшем случае пылесос может выйти из строя.
Эта модель имеет четыре основных режима уборки:
- Автоматический (Auto) — однократная уборка змейкой от препятствия до препятствия всей доступной площади с использованием навигации.
- Максимальный (Max) — уборка всей доступной площади сначала змейкой, как в режиме Auto, потом тоже змейкой, но в перпендикулярном направлении.
- Локальный (Spot) — интенсивная очистка определенного места. В это место пылесос или просто переносится, или направляется в режиме ручного управления.
- Ручной — ручное управление движением с помощью пульта ДУ, но сначала нужно запустить робота на уборку, иначе он перемещается, но не убирает.
Заявлено, что в режимах Auto и Max робот может один раз вернуться на базу для подзарядки, если он на одном заряде с первого раза не уберет всю доступную площадь. Модификатором режимов уборки является опция преодоления препятствий (Climb), при ее выборе робот будет пытаться преодолевать препятствия высотой до 15 мм, а если эта опция не активна, то высота преодолеваемых препятствий ограничена 5 мм. Напомним, что при установке протирочной насадки робот автоматически отключает опцию Climb. Есть опция увеличенной мощности вентилятора (Turbo), также заявлено, что пылесос автоматически включает Turbo на коврах. Можно настроить автоматический запуск уборки в выбранном режиме каждый день в установленное время.
Пространственное планирование уборки обеспечивается с помощью ограничительной магнитной ленты, которую можно наклеить на гладкую поверхность (кусочек двухсторонней клейкой ленты прилагается) или спрятать под тонким покрытием пола. В комплекте поставки присутствует отрезок такой ленты длиной 1 м.
О своем состоянии пылесос информирует с помощью светодиодного индикатора и звуковых сигналов. Отключить звуковое оповещение, к сожалению, нельзя.
Тестирование
Ниже представлены результаты тестирования по нашей методике, подробно описанной в отдельной статье.
| Режим | Время уборки*, мм:сс | Убрано, % |
| Auto+Turbo | 9:35 | 96,4 |
| Auto | 9:56 | 97,4 |
| Max (продолжение) | 19:40 | 98,9 (суммарный) |
| *От начала уборки до заезда на базу. | ||
Видео ниже снято с одной точки с максимально возможным в наших условиях охватом убираемой территории, база находится внизу по центру, при обработке часть видеоряда ускорена в десять раз. Режим Auto с увеличенной мощностью вентилятора (Turbo).
И режим Max с отключенным Turbo:
Проведенные тесты показали, что в режиме Auto территорию уборки робот однократно проходит змейкой с минимальным перекрытием и по возможности наиболее рациональным способом. В режиме Max первая половина уборки проходит также, как и в режиме Auto, а затем с началом от базы выполняется вторая половина уборки, но направление змейки уже перпендикулярно направлению в первой части. Робот определенно строит и использует карту убираемой поверхности, это видно по маршруту движения — он по возможности убирает поверхность только один раз и целенаправленно переходит к тому месту, которое он еще не убирал. Без карты такое поведение было бы невозможно осуществить. С зарядной базой робот обращается очень аккуратно, во время уборки подъезжает к ней близко, но на нее не наезжает, не толкает и с места не сдвигает. Робот с готовностью забирается в узкий загончик (на 50 мм шире ширины робота) и тщательно там убирает. Между высокими вертикальными и хорошо отражающими ИК-лучи стенками и корпусом робота обычно остается зазор всего порядка 1 см, тогда как к низким, наклонным (например, к плинтусу) или к очень темным стенкам робот подъезжает вплоть до физического контакта — до срабатывания датчиков бампера. Итогом такого поведения является то, что не только на площади, но и в загончике, вдоль стен и около базы остается очень мало неубранного мусора. iClebo Omega убирает тестовый мусор быстрее и лучше, чем все побывавшие до него у нас на тестировании роботы-пылесосы. После однократного запуска в режиме Auto+Turbo:
И после последовательно работы сначала в режиме Auto, затем в режиме Max (убрано 98,9% риса).
В условиях нашего эксперимента включение повышенной мощности вентилятора (Turbo) не приводило к увеличению качества уборки, но даже при отключенном Turbo, вентилятор все равно периодически включался на максимальную мощность, видимо, робот считал, что он убирает на ковре, что отчасти справедливо.
Дополнительно были проведены натурные испытания. Для этого в офисном и относительно чистом отсеке был выгорожен участок из нескольких помещений общей площадью примерно 160 м² (без учета того, что занимает мебель и др.). Первые несколько минут выявили проблему — робот очень плохо преодолевал порожки (местами, правда, с немного выступающими головками саморезов), он чем-то на днище постоянно за них цеплялся. Ближе к концу (индикатор показывал низкий заряд батареи) первого цикла на одном из порожков робот зацепился за него, в попытках преодолеть препятствие вывесил колесо и прекратил работу с ошибкой C1. Расследование выявило, что робот цеплялся за порожки жестким скребком рамки блока основной щетки. Цеплялся так, что скребок рамки частично оторвался, но без поломки фиксаторов.
Скребок был защелкнут обратно, но для продолжения теста рамка и основная щетка были изъяты, то есть целью теста стало только выяснение того, как робот ориентируется в сложной обстановке. Заодно доступная площадь была уменьшена до 110 м², именно столько по нашей оценке робот способен убрать на одном заряде батареи. Схема помещения приведена ниже. На ней цветными прямоугольниками отмечены доступные роботу комнаты и красным кружком отмечено расположение базы.
Во время второго теста робот змейкой убрал практически всю доступную площадь, но без доочистки в тех местах, где змейка не захватила небольшие участки пола. Убирал робот 70 минут (напомним, что это без основной щетки, то есть с чуть более низким потреблением). Отметим, что в этом тесте была принудительно включена повышенная мощность вентилятора (режим Turbo). По данным производителя робот убирает примерно 1 м² в минуту и работает от 60 до 80 минут. То есть с учетом промежуточной подзарядки робот может убрать 120-160 м². Эти данные согласуются с результатами наших тестов, напомним, что из указанных нами 110 м² нужно вычесть значительную площадь, занимаемую мебелью и оборудованием. Завершив первый цикл уборки, робот поехал на подзарядку, и сначала чуть промахнувшись мимо дверного проема при выезде из комнаты, за пару минут благополучно добрался до базовой станции. Мигающее время на дисплее робота указывало на то, что после зарядки он должен был выполнить второй цикл, и убрать оставшуюся площадь, но дожидаться окончания зарядки и продолжения уборки мы не стали.
Первый тест, который еще с основной щеткой, позволил понять, как собирается типичный бытовой мусор. Боковые щеточки плотно наматывают на себя волосы и нитки, но и легко очищаются пальцами без привлечения инструментов.
На основную щетку ничего не намоталось, это главное преимущество щетки без ворса. Мусор в пылесборнике оказался слегка утрамбованным к фильтру, что косвенно свидетельствует о высокой мощности всасывания. Под сеточку на фильтре проникло немного мусора, но он легко был извлечен с помощью обычного пылесоса. Мусор, несмотря на рамку фильтра, легко покинул внутренность пылесборника при вытряхивании.
В режиме локальной уборки (Spot) робот по разворачивающейся и потом сворачивающейся спирали убирает в круге диаметром более 2 м, что с нашей точки зрения многовато для локальной уборки. Видео ниже это демонстрирует (при обработке часть видеоряда ускорена в десять раз):
Тестирование с использованием ограничительной ленты показало, что она действительно не позволяет роботу себя пересекать. Но если ее просто положить на пол, то робот с большой вероятностью заденет ее краем и сдвинет, поэтому ленту, как и рекомендует производитель, нужно приклеивать к полу или укладывать под тонкое напольное покрытие, под ковром робот ленту может не заметить.
Робот ожидаемо шумит громче в режиме с повышенной мощностью вентилятора (Turbo):
| Режим | Уровень шума, дБА |
| Turbo выключено | 60 |
| Turbo включено | 61,5 |
Робот относительно громкий, характер шума доставляет определенный дискомфорт. Основной вклад вносят стук основной щетки о пол и завывание вентилятора, усиливающееся при включении Turbo. Ситуация усугубляется тем, что корпус явно выступает в роли резонатора, переводя вибрации в звук, также у основной щетки лопасти прямые, а не закручены, поэтому каждая лопасть ударяет о пол сразу по всей длине.
Во время зарядки пылесоса на базе потребление от электросети достигает 40 Вт. Для полной зарядки разряженного аккумулятора роботу достаточно провести на базе примерно 2 ч. 40 мин. Если пылесос включен, заряжен и находится на базе, то от сети потребляется 0,45 Вт, с периодическим кратковременным повышением до 17 Вт, видимо, для восстановления заряда батареи. Если пылесос убрать с базы, то потребление упадет до 0,3 Вт — столько потребляет сама база и блок питания.
Выводы
Робот-пылесос iClebo Omega убирает быстро и качественно. Такой результат достигается за счет вынесенных вперед и в стороны двух боковых щеточек, эффективной безворсовой основной щетки, высокой мощности всасывания и навигации, благодаря которой робот реже проезжает по уже убранным местам и не оставляет неубранные участки на доступной ему площади.
Достоинства:
- Высокое качество уборки
- Система ориентации и прокладка рационального маршрута
- Удобный пылесборник
- Оригинальный дизайн
- Фильтр HEPA E11
- Две боковые щетки
- Безворсовая основная щетка
- Возможность установки протирочной насадки
- Функция ежедневной уборки в заданное время
- Ограничение движения с помощью магнитной ленты
- Устойчивая база
- Есть пульт ДУ
Недостатки:
- Высокий уровень шума
- Жесткий скребок цепляется за порожки
www.ixbt.com
Робот-пылесос iRobot Roomba 980
То, чего многие фанаты iRobot ждали уже очень давно, наконец воплотилось в новом роботе iRobot Roomba 980: теперь он умеет ориентироваться и в нем используется литий-ионная батарея. Да здравствует мощь и интеллект!
Содержание:
Паспортные характеристики, комплект поставки и цена
| Кинематическая система | Два ведущих колеса, один поворотный ролик, один фиксированный ролик |
| Способ сбора мусора | Инерционное перемещение и вакуумная фильтрация |
| Пылесборник | AeroForce, одно отделение для мусора, встроенный вентилятор (мотор 3-го поколения), HEPA-фильтр |
| Основная щетка | Два безворсовых валика-скребка |
| Боковые щетки | Одна |
| Дополнительно | Нет |
| Режимы очистки | Обычный, локальный, уборка по расписанию. Модификаторы: авто/повышенная/пониженная мощность, уборка за два прохода, обход вдоль стен и препятствий |
| Эффективность очистки | Нет данных |
| Уровень шума | Нет данных |
| Датчики препятствий | Механический передний/боковой бампер, ИК-датчики приближения и перепада высоты |
| Датчики ориентации | Нижняя видеокамера, потолочная видеокамера, ИК-датчики поиска базы и определения виртуальных стен |
| Управление на корпусе | Механические кнопки |
| Дистанционное управление | По Wi-Fi через мобильное приложение iRobot Home |
| Оповещение | Светодиодная индикация, звуковые сигналы и голосовое оповещение об ошибках, через приложение iRobot Home |
| Время автономной работы | До 2 часов |
| Время зарядки | Нет данных |
| Способ зарядки | На зарядной базе с автоматическим возвратом |
| Аккумулятор | Литий-ионная батарея, 14,4 В, 48 Вт·ч, 3300 мА·ч |
| Потребляемая мощность | Нет данных |
| Масса | 3,94 кг |
| Размеры (диаметр×высота) | 35×9 см |
| Особенности |
|
| Комплект поставки* |
|
| Ссылка на сайт производителя | irobot.com и irobot.ru |
| Средняя цена по данным Яндекс.Маркет | T-13118496 |
| Предложения по данным Яндекс.Маркет | L-13118496-10 |
Внешний вид
Внешне робот очень похож на роботов 800-ой серии и имеет с ними много взаимозаменяемых узлов и элементов конструкции. Однако есть и существенные отличия.
Пылесос в плане имеет практически идеально круглую форму.
Скос от края к днищу помогает преодолевать препятствия, а некоторая угловатость сверху снижает вероятность того, что пылесос будет застревать под препятствиями с небольшим просветом.
Корпус пластиковый, в основном черный, с матовой поверхностью и без покрытия. Периметр верхней панели, верхняя часть бампера и часть пылесборника имеют окантовку из пластика с темно-серым серебристым покрытием. Верхняя панель, по всей видимости, выполнена из прозрачного пластика, относительно устойчивого к повреждениям. Изнутри на панель нанесен темный рисунок или просто черное покрытие и только окошко над верхней камерой оставлено прозрачным.
Ближе к передней части на верхней панели находятся три механические кнопки — большая круглая кнопка из твердого пластика с серебристым покрытием и по бокам две поменьше из упругого пластика. Ободок центральной кнопки, значок и надпись на ней подсвечиваются зеленым, когда робот находится в активном состоянии. Значки на малых кнопках подсвечиваются белым. Перед кнопками сквозь панель подсвечиваются значки-индикаторы состояния. Еще ближе к переднему краю есть откидывающаяся вверх на небольшой угол ручка, за которую пылесос удобно переносить. Нижняя часть бампера окантована резиновой «юбочкой», предохраняющей мебель от царапин. Верхняя половина бампера прикрыта вставкой из тонированного пластика черного с виду, но прозрачного для ИК-излучения (за ним спрятаны ИК-датчики препятствий и парковки на базу). Вверху по центру бампера — обзорный выступающий вверх ИК-датчик, который собственно и определяет минимальную высоту просвета предметов обстановки, под которые пылесос еще может забраться.
Перевернув пылесос вверх днищем, в передней части (сверху на фотографии) мы видим две контактные площадки, ролик на вращающейся платформе, боковую щетку, крышку отсека АКБ, справа от нее гнездо нижней камеры, далее вниз — два ведущих колеса на подпружиненных рычагах, отсек с основными валиками-щетками и днище отсоединяемого пылесборника. По периметру днища робота ближе к краю расположены шесть ИК-датчиков перепада высоты.
База, на которой пылесос подзаряжается, в точности такая же, что и база пылесосов 800-й серий.
Она имеет встроенный блок питания и отсоединяемый кабель питания. Это хорошо — нет внешнего БП и дополнительных проводов, которые постоянно мешались бы, и база относительно тяжелая, что повышает ее устойчивость. Штатный кабель питания относительно короткий — 1 м, но, при необходимости, найти ему замену труда не составит, так как разъем на базе представляет собой стандартную «восьмерку».
Снизу на основание базы приклеены небольшая резиновая площадка и составная площадка побольше из поролона и какого-то другого пористого материала в шашечку.
В итоге база хорошо цепляется за пол с самой разнообразной поверхностью, но в случае чего закрепить базу на полу можно с помощью, например, двусторонней клейкой ленты. Отметим, что база полностью взаимозаменяема с комплектом из базы и БП от предыдущих моделей Roomba.
Пылесос комплектуется двумя виртуальными стенами новой конструкции, к которым приложены щелочные (!) элементы питания типа AA известного производителя (один комплект мы уже установили в стену). Кроме того, в коробке мы обнаружили один запасной фильтрующий элемент, а судя по описанию на сайте, в стандартный комплект входит еще и одна запасная боковая щеточка.
У нас на тестировании был предпродажный уже слегка использованный образец с неполной комплектацией (как минимум не было боковой щеточки и никакой документации) и в простой неоформленной коробке.
Функционирование
О функциях пылесоса обязательно нужно прочитать в прилагаемом руководстве пользователя. Тем, кто только присматривается к подобной технике, можно порекомендовать загрузить руководство с сайта (русская версия была доступна на оригинальном сайте компании-производителя), и внимательно его изучить.
Тем, кто не читает руководства по эксплуатации, настоятельно рекомендуем прочитать хотя бы два нижеследующих абзаца:
Предупредим, что этот пылесос недопустимо использовать во влажном помещении или на поверхностях с разлитыми жидкостями. После контакта пылесоса с жидкостями в лучшем случае придется долго очищать его от налипшего слоя пыли, в худшем случае пылесос может выйти из строя.
Ни одну из частей пылесоса недопустимо мыть под водой — ни щетки, ни фильтр, ни сам пылесборник. Даже одна капля, неудачно просочившаяся внутрь робота, может привести к выходу из строя основной платы.
Оси ведущих колес расположены на одном диаметре окружности корпуса. Такая кинематическая схема позволяет роботу совершать разворот на месте без изменения границ, занимаемой роботом площади, поэтому пылесос отличается хорошей маневренностью. Диаметр ведущих колес относительно большой (71 мм), а ход шарниров в точке центров колес достигает почти 30 мм, поэтому робот без особых проблем преодолевает встречающиеся препятствия небольшой глубины и высоты. Потенциально робот способен преодолевать препятствия высотой где-то до 19 мм — примерно такое расстояние от пола до нижней точки бампера пылесоса, что согласуется с проходимостью, то есть робот не будет пытаться залезть на то, на чем с большой вероятностью застрянет.
Передний подруливающий ролик служит третьей опорой, однако, несмотря на привычную черно-белую раскраску, он уже не является частью датчика перемещения (под ним нет фотодатчика). Эти функции возложены на нижнюю камеру. По всей видимости она оснащена ИК-подсветкой и позволяет отслеживать перемещение робота по полу по изменению между снимками. Как в случае мыши с оптическим датчиком, разве что, возможно, кроме перемещения отслеживается и поворот. Видимо, примерно по такому же принципу работает и направленная вверх камера на верхней панели робота, только отслеживаются изменения на снимках потолка и окружающей обстановки. Есть ли у робота другие датчики, помогающие в ориентации в пространстве, например, акселерометр и/или гироскоп, нам неизвестно.
При уборке передняя боковая щеточка подгребает мусор к центру. Правильной работе этой щеточки способствует наклон ее оси внутрь, благодаря чему прижим сильнее на фазе движения сбоку-вперед. Также отметим конструкцию боковой щеточки — гибкие упругие поводки (для прочности прошитые на концах) заканчиваются относительно жесткой прямой щетиной. В результате щеточка работает эффективно и не теряет свою форму. (Одна такая щеточка даже при активном использовании робота может прослужить несколько лет, если, конечно, в зоне работы робота нет предметов, представляющих для щеточки повышенную опасность.) Саморез, фиксирующий эту щеточку теперь не выпадает из центрального отверстия (его сложнее потерять) и дополнительно имеет широкий прямой паз, поэтому снять и установить щеточку можно без крестовой отвертки, достаточно монеты (текущий рубль подходит). При этом прямая и обратная совместимость с боковыми щетками от предыдущих моделей сохранилась.
Основных щеток две, они вращаются навстречу друг другу. На самом деле это не совсем щетки, так как они лишены ворса, но мы будем по привычке называть их щетками (в русском руководстве используется сложное название валики-скребки, в английском — extractor). Две щетки не взаимозаменяемые, но конструкцию имеют одинаковую: внешний упругий цилиндр с ребрами (не резиновый, а скорее из силикона), закрепленный на оси из твердого пластика. С одной стороны эта ось продолжена шпилькой из нержавеющей стали, на которую надета желтая пластиковая втулка с бронзовым подшипником скольжения.
С другой — ось заканчивается шестигранником или квадратом, что соответствует ответной части в механизме вращения щеток. Дополнительную упругость внешней оболочке щеток придает находящийся внутри цилиндров наполнитель из поролона. Напомним, что основным преимуществом таких валиков без щетины является то, что они очень мало наматывают на себя волосы, шерсть, нитки и т. д., а все немногое намотавшееся (в основном на торцы) легко снимается при очистке без использования каких-либо инструментов. Владельцы домашних животных с шерстью должны особенно оценить это. Вращающиеся щетки сначала подхватывают мусор с пола, затем мусор воздушным потоком перемещается в емкость пылесборника. Тяжелый мусор остается на дне емкости, а мелкий и легкий задерживается воздушным фильтром. Примерная схема, представленная ниже, демонстрирует основной принцип сбора мусора:
Отметим, что такая конструкция не исключает прямой заброс тяжелых частиц в пылесборник, но делает его маловероятным, в отличие от предыдущего варианта (в сериях до 800-ой) с большой щеткой с длинным ворсом и кромкой емкости для мусора непосредственно у щетки. Стыки узлов и деталей на всем пути воздуха от щеток до выхлопной решетки сзади имеют упругие уплотнения, а щеточный узел соединен с корпусом упругим и герметичным воздушным рукавом, что уменьшает паразитный подсос воздуха. Также производитель обещает увеличенную в несколько раз, в сравнении с предыдущей линейкой роботов, мощность вентилятора. Наши замеры это подтвердили, так при питании от 12 В мотор вентилятора в 800-й серии потребляет порядка 460 мА, тогда как новый мотор в 980 — 2 А, что 4 раза с хвостиком больше. Возможно из-за более мощного и чуть более тяжелого вентилятора на днище пылесборника появился небольшой ролик. Новый пылесбоник можно установить в роботы 800-ой серии, и вентилятор там работает, но с учетом гораздо большего тока лучше так не делать.
Днище пылесборника выполнено из прозрачного тонированного красным пластика, но прозрачной оставлена только узкая полоска, остальная поверхность заматирована, поэтому визуально, просто осмотрев робота, о степени заполнения пылесборника судить сложно.
Очищать пылесборник относительно просто: откидывается шторка, и пыль вытряхивается. Затем вынимается и очищается HEPA-фильтр.
Заметим, что в этом фильтре сначала идет крупноячеистая сеточка, которая не допускает крупную пыль до складчатого мелкопористого фильтра. Это облегчает чистку фильтрующего элемента и повышает его долговечность. Новый мотор-вентилятор больше по габаритам и размещен в отсеке под углом. Перед входным отверстием вентилятора теперь установлена откидывающаяся шторка, видимо, уменьшающая вероятность попадания мусора в вентилятор, когда пылесборник вытряхивается с вынутым фильтром. Отсоединять пылесборник относительно удобно, после некоторой тренировки удается сделать это одной рукой, не сдвигая припаркованный на базе пылесос.
Отсек, в котором находятся основные щетки, закреплен на рычажках, поэтому с ходом примерно в 9 мм он следует рельефу пола, что увеличивает эффективность очистки. Проволочных направляющих-ограничителей нет, предотвращение наматывания уголков ковриков возложено на систему управления и контроля. На фотографии ниже обозначены элементы системы определения степени загрязнения Dirt Detect 2, перешедшей по наследству от предыдущих моделей.
В состав Dirt Detect 2 входят акустический (по центру) и оптический датчики. Первый датчик по шуму ударяющихся о мембрану микрофона частиц определяет степень загрязнения в текущем месте уборки. Второй датчик, состоящий из источника ИК-излучения и фотоприемника, просвечивает пылесборник сразу за шторкой. Соответствующее изменение степени поглощения в ИК-диапазоне позволяет также отслеживать содержание пыли в потоке воздуха, и дополнительно, указывает на переполнение пылесборника.
Все, что требует частого внимания со стороны пользователя, обозначено желтым цветом. Подробно, как ухаживать за роботом, описано в руководстве пользователя (на сайте есть и видео-инструкция), поэтому не будем повторяться.
Аккумуляторная батарея теперь литиевая и имеет чуть большую заявленную емкость (было 3000 мА·ч, стало 3300 мА·ч.)
Поверхностные тесты показали, что эта новая и старые батареи совместимы с Roomba 980 и предыдущими моделями. Так старенький робот Roomba 531 без проблем работал от новой литиевой батареи, и заряжал ее на базовой станции. Отметим, что Roomba 531 от этой батареи непрерывно убирал 3 ч 25 мин, вместо обычных 2 ч, а встроенная диагностика робота показала емкость батареи в 3700 мА·ч. И наоборот, новый Roomba 980 работал со старой Ni-MH. Однако производитель настоятельно рекомендует использовать с Roomba 980 только новую литиевую батарею. Какова официальная позиция относительно того, можно ли со старыми роботами использовать новую литиевую батарею, нам неизвестно.
Повышенный «интеллект» нового робота проявляется не только в том, что теперь он умеет ориентироваться в пространстве, но и в поддержке удаленного управления с помощью мобильного (доступны версии для iOS и Android) приложения iRobot Home.
В принципе, использовать робота, можно без приложения и не подключая его к Сети, но со смартфона или планшета предоставляется доступ к недоступным иначе настройкам робота, именно с помощью iRobot Home можно задать расписание работы робота на неделю, приложение поможет понять, в каком состоянии сейчас робот, покажет вводную видео-инструкцию и текстовое подробное руководство, даст ответы на часто задаваемые вопросы и даже подскажет, что пора заменить, и поможет купить запасные части, и т. д., и т. п. И все это на понятном русском языке. Обязательно нужно ставить!
И еще, обновления для робота теперь загружаются по Wi-Fi и устанавливаются, видимо, в принудительном порядке. После установки и запуска приложение подскажет, как подключить робота к Сети. Отметим, что поддерживается только Wi-Fi в простом виде (без VPN и т. д.), и только диапазон 2,4 ГГц (каналы 1—13 для моделей не для Северной Америки). Некоторые маршрутизаторы могут потребовать дополнительных настроек или оказаться вовсе несовместимыми и т. д. — см. подробности на сайте, однако в большинстве случаев все должно получиться без особых усилий. Робот запоминает только одну сеть, поэтому не может автоматически переключаться при переходах между сетями, но настройки сети сохраняются даже после изъятия батареи. Связь приложения с роботом осуществляется, по всей видимости, через облачный сервер. С одной стороны это хорошо, так как приложение имеет доступ к роботу из любой точки, где есть интернет, с другой — плохо, так как при наличии проблем на стороне сервера или без доступа к Сети управлять роботом из приложения невозможно, даже если робот и планшет/смартфон находятся в одной сети.
iRobot Roomba 980 имеет два основных режима уборки:
1. Автоматическая уборка всей доступной площади. По окончании уборки пылесос возвращается на базу.
2. Режим локальной очистки (режим Spot) — интенсивная очистка определенного участка. В нужное место пылесос переносится пользователем.
При использовании мобильного приложения становятся доступными 4 опции:
Управление вентилятором — повышать мощность на коврах (по умолчанию), включать вентилятор на высокую мощность на все время уборки или использовать только низкую мощность. Выполнять уборку за один проход (по умолчанию) или за два. Продолжать работу при заполненном пылесборнике (по умолчанию) или завершать уборку при его переполнении. Убирать в конце вдоль стен и мебели (по умолчанию) или не делать этого.
Режима с ручным управлением не предусмотрено и в руководстве он не упоминается. Впрочем, эксперименты показали, что робот реагирует на команды движения, поданные ИК-пультом от предыдущих моделей. Также с пульта можно запустить и остановить уборку, но по какой-то неведомой причине, разработчики заблокировали команды локальной уборки и возврата на базу. Запуск автоматической уборки можно назначить на определенное время в любой день недели, при этом время запуска устанавливается (или не устанавливается) свое на каждый из семи дней. Если расписание создано, то в заданное время пылесос съедет с базы, проведет уборку и вернется на базу. Напомним, что редактировать расписание теперь можно только из мобильного приложения
Пространственно организовать уборку поможет виртуальная стена — специальное устройство, входящее в комплект поставки (в коробке две штуки, но при необходимости, их можно докупить дополнительно).
Это устройство работает от двух элементов питания типа АА. Стена может работать в двух режимах. В первом в направлении (указано полоской сверху) от виртуальной стены создается невидимая преграда (длиной 3 м по заверениям производителя), которую пылесос не пересекает. С помощью такой преграды можно отгородить места, где выполнять уборку нежелательно. Во втором стена работает в режиме кругового ограничителя, не подпуская к себе робота ближе определенного расстояния (заявляется о радиусе в 60 см). Фактически во втором случае режим направленной преграды просто не активируется, работает только круговой излучатель на верхушке башенки.
Типичный пример использования кругового ограничителя — это создание защитного барьера вокруг мисок с кормом и водой для домашних четвероногих питомцев. Включается и выключается устройство переключателем сбоку, им же выбирается режим работы. В обычной ситуации выключать устройство необязательно (видимо, оно активируется само при приближении робота), при этом производитель утверждает, что в таком случае от одного комплекта источников питания стена может работать 8-10 месяцев. И только в случае планируемого длительного неиспользования для продления срока работы элементов питания стену желательно выключать
О своем состоянии пылесос информирует с помощью светодиодных индикаторов, кроме того, о переходах между некоторыми состояниями пылесос сообщает, проигрывая короткую мелодию, а об ошибках он информирует, проговаривая соответствующую фразу на выбранном пользователем языке (русский язык, видимо, доступен). Отключить звуковое/голосовое оповещение нельзя. Ну и, конечно, не забываем о мобильном приложении — с его помощью находясь в любой точке мира (главное, чтобы Сеть была) можно узнать, что робот делает в данный момент. Ну и прочее — сколько всего убрал (в квадратных футах), сколько раз запускался, текущий уровень износа и т. д. Жалко что картинку с камеры нельзя подсмотреть, и, как заверяет производитель, нельзя в принципе.
Тестирование
Ниже представлены результаты тестирования по нашей методике, подробно описанной в отдельной статье. Опция «завершать уборку обходом вдоль стен и препятствий» всегда включена. Каждый раз робот запускался после полной зарядки батареи.
| Режим | Время уборки, ММ:СС | % |
| Один проход, высокая мощность | 20:20 | 91,3 |
| Один проход, высокая мощность | 15:05 | 88,8 |
| Два прохода, высокая мощность | 29:54 | 96,1 (суммарный) |
| Два прохода, низкая мощность | 28:20 | 95,1 (суммарный) |
Робот определенно строит и использует карту, это видно по маршруту движения — он заполняет змейкой всю доступную площадь, при этом по возможности убирает поверхность только один раз и целенаправленно переходит к тому месту, которое он еще не убирал. Также целенаправленно он возвращается к базовой станции по завершении уборки. Без карты такое поведение было бы невозможно осуществить.
Видео ниже снято сверху с одной точки, база находится внизу по центру, при обработке часть видеоряда ускорена в десять раз. Один проход, высокая мощность:
При обнаружении загрязненного участка робот медленно прокатывается взад-вперед два раза и затем продолжает уборку в обычном режиме. По всей видимости, черный ковролин с коротким ворсом робот принимал за ковер, так как и в режиме с автоматическим изменением мощности вентилятора, и в режиме с максимальной мощностью шумел робот абсолютно одинаково на протяжении всей уборки. В узкий загончик (шириной на 5 см шире корпуса робота) пылесос обычно заезжал, пусть и не очень охотно. А в конце, как и было обещано, робот убирал вдоль стен и предметов обстановки (эта опция была включена). В режиме с двумя проходами второй раз робот меняет направление проходов на перпендикулярное, что, по идее, должно улучшать качество перекрытия поверхности пола:
Для наглядности рассмотрим движение с меткой (для наглядности из препятствий оставлен только загончик):
Перекрытие поверхности пола является достаточно равномерным, видно, что робот больше внимания уделяет стенам и пространству вокруг базы (сказывается дополнительный обход по периметру и способ следования вдоль темных стен, которые не видны дистанционными ИК-датчиками, и около ограничительной зоны базы). В режиме с пониженной мощностью робот только в самом начале пробует вентилятор на высокой мощности, затем снижает ее и больше не повышает. Вот начало уборки в таком режиме:
С базой робот обращается аккуратно — не было случая, чтобы пылесос сдвинул базу после начала уборки, и робот в наших тестах всегда заезжал на базу с первого раза. При этом непосредственно около базы оставалось не так уж и много мусора. Хотя в целом, качество уборки, особенно в режиме с одним проходом не впечатляет. Напомним, что iRobot Roomba 870 за 20 с небольшим минут убирал 97% тестового мусора. С точно такими же щеточками и с менее мощным вентилятором. В данном же случае после 15-20 минут уборки с одним проходом много мусора остается на площади и около стен и препятствий:
Где-то на треть или в два раза больше времени в режиме с двумя проходами ситуацию исправляют, мусора на полу остается немного:
На площади почти нет, рис остался в основном непосредственно около базы:
Немного в углах:
И в сложном тупичке:
Видимо, слишком много времени робот тратит на медленные проходы при обнаружении загрязненных участков, что в данном случае не особо повышает эффективность. Также робот отличается некоторой задумчивостью — иногда останавливается, о чем-то про себя размышляя. Вообще наш тестовый участок с черным ковролином плохо совместим с навигационной системой робота. Можно предположить, что нижняя камера плохо на нем работала, а одной верхней тоже было недостаточно из-за таких же черных стен и потолка. В итоге робот иногда терял ориентацию и проводил слишком много времени, крутясь на месте или двигаясь странным маршрутом. Так в тесте с меткой при выключенном верхнем свете робот стал двигаться почти хаотично, пришлось включить треть потолочных светильников, что уже спасло положение — на записи с меткой змейка ровная. Справедливости ради отметим, что в аналогичных тестах роботы с навигацией от других производителей на черном ковролине и в темноте ориентацию не теряли, разве что роботов Neato с их лазерным радаром черные неотражающие стены очень смущали, нужно было хоть что-то светлое для них ставить.
В режиме локальной очистки (Spot) робот убирает по разворачивающейся и затем сворачивающейся спирали, так как это демонстрирует видео ниже:
В этом режиме робот убирает в почти круге диаметром примерно 1,2 м.
Дополнительно было испытано устройство ограничения в режиме виртуальной стены. Отметим, что стены предыдущего варианта работают с новым Roomba 980, и новые стены отпугивают старых роботов, но, видимо, они автоматически не будут включаться при запуске робота. Новую элегантную и компактную стену мы установили у стены (слева на видео ниже), перегородив тестовый загон поперек, и запустили робота. Что получилось, демонстрирует видео ниже (частично ускоренное в 10 раз):
Робот через какое-то время потерял ориентацию (ну не нравится ему все черное), но стена свою задачу выполнила и создала непреодолимый для робота барьер длиной как минимум в 3 м. И в режиме кругового ограничителя:
Где-то в радиусе 50 см от ограничителя мусор на полу остался. Работает.
Дополнительно были проведены натурные испытания. Для этого в офисном и относительно чистом отсеке был выгорожен участок из трех помещений, обозначенных на схеме как А (28,4 м² — «прихожая»), Б (23,3 м² — «коридор») и В (18,5 м² — «комната»). База установлена в помещении А (мебель и прочее — столы, кресла, аквариум и т. д. на схеме не показаны):
Режим работы — высокая мощность и два прохода. При запуске с базы в общей сложности робот убирал 1 час 8 минут. При этом где-то на 45-й минуте он завершил первый цикл и стал выполнять второй проход и, не закончив его, на 7-й минуте второго часа поехал на базу для подзарядки. Как только робот припарковался на базе, мы его с нее сняли, убрали базу и включили робота. Еще 13 минут робот провел в поисках базы (щетки и вентилятор работали как при уборке) и только затем остановился и решительно потребовал его зарядить. То есть запас на нахождение базы весьма приличный, учитывая то, что робот «знает», где находится база. В условиях реального помещения робот хорошо сохранял ориентацию, например, при движении из комнаты в дверной проем он промахивался где-то на 15-20 см не больше. Явных пропусков мы не обнаружили, даже если робот пропускал участок, то потом он возвращался и убирал там. Впрочем, как и все побывавшие у нас на тестировании роботы с навигацией, по крайне мере в первый раз робот не оперирует такими понятиями как комната и стены, с его точки зрения есть какая-то доступная площадь и препятствия на ней, как робот обойдет эту площадь определяется порядком обнаружения препятствий и алгоритмом уборки, на реальные комнаты робот площадь не делит. В этом плане условная навигация с помощью маяков, реализованная в предыдущих топовых моделей iRobot, имеет определенные преимущества — пользователь может в явном виде отделить комнаты, в которых робот будет последовательно выполнять уборку.
Если использовать приведенные выше данные и считать, что на один цикл уборки площади примерно в 70 м² робот тратит 45 минут, то в режиме высокой мощности за один проход робот может убрать порядка 200 м² с учетом одной подзарядки (а в явном виде нигде не сказано, сколько раз робот может подзаряжаться и самостоятельно возобновлять уборку). В режиме с низкой мощностью вентилятора (а на тестовом мусоре это не сильно снижало эффективность) время работы и максимальная площадь увеличатся, а в режиме с двумя проходами соответственно уменьшатся.
Уровень шума мы измеряли в двух режимах:
| Мощность вентилятора | Уровень шума, дБА |
| Низкая | 60 |
| Высокая | 66 |
Для сравнения уровень шума в этих условиях обычного (не самого тихого) пылесоса равен примерно 78 дБА. В режиме с низкой мощностью вентилятора робот шумит примерно как модели 800-й серии — громко, но еще терпимо. Когда же робот работает в режиме с высокой мощностью вентилятора находиться с ним в одном помещении уже очень не комфортно — шум громкий и неприятный. Характер шума можно также оценить по ролику ниже, там же показаны и некоторые другие моменты:
На полную зарядку батареи уходит почти три часа (у нас получилось 2 часа и 55 минут), что соответствует увеличенной емкости батареи при оставшимся неизменном блоке питания. В процессе зарядки пылесоса на базе потребление от электросети равно примерно 29 Вт. Если пылесос включен, заряжен и находится на базе в состоянии готовности, то от сети потребляется порядка 4,5 Вт. Если пылесос убрать с базы, то потребление упадет до 0,5 Вт — столько потребляет сама база, включенная в сеть.
Выводы
Компания iRobot превзошла ожидания поклонников ее уборочной техники, выпустив первого в ее истории робота-пылесоса с системой продвинутой ориентации. Но на этом значимые новшества не закончились, новый Roomba 980 получил емкую литий-ионную батарею, в четыре раза более мощный вентилятор и поддержку удаленного контроля и управления с помощью мобильного приложения. В случае помещений из одной-двух комнат способность к ориентации особых преимуществ не дает, так как и предыдущие модели роботов Roomba в таких ситуациях хорошо справлялись с уборкой, но в квартире из нескольких комнат робот, понимающий, где он находится и где уже убрал, может достичь более стабильного результата, так как с гораздо большей вероятностью с первого раза уберет везде, куда только сможет попасть. На основании результатов проведенных нами тестов мы можем предположить, что программное обеспечение робота еще может быть улучшено, так как робот слегка задумчивый и в сложных ситуациях бывает, что теряет ориентацию. Это немного снижает общую эффективность, но простота автоматического обновления «по воздуху» дает надежду, что компания iRobot использует эту возможность для дальнейшего совершенствования алгоритмов ориентации и уборки. К сожалению, проследить за прогрессом мы не сможем, так как робота нас попросили вернуть. Но, возможно, с выходом значимых обновлений у нас получится повторить ряд тестов.
Достоинства:
- Хорошее качество уборки вдоль стен, вокруг препятствий и на открытой площади
- Система продвинутой ориентации
- Функциональное мобильное приложение для контроля и управления
- Легкая очистка основных щеток
- Высокая мощность всасывания
- Как минимум однократное возобновление уборки после подзарядки
- Поддержка виртуальных стен и круговых ограничителей
- Датчики переполнения пылесборника и уровня загрязнения
- HEPA-фильтр
- Бережное отношение к мебели — замедление перед препятствием и мягкая накладка на бампере
- Режим уборки по расписанию
- Хорошая комплектация — запасные фильтр и боковая щеточка, две виртуальные стены и комплект щелочных элементов питания к ним
- Компактная интегрированная база
- Голосовое оповещение
- Отличная локализация для России
Недостатки:
- Неотключаемое звуковое оповещение
- Высокий уровень шума в режиме максимальной мощности вентилятора
- Важные опции доступны только из мобильного приложения при работающем подключении к Сети
www.ixbt.com
Как работает робот-пылесос + Видео
Робот-пылесос — бытовой прибор с интеллектом, тренд XXI века. Современные люди загружены различными проблемами. Для этого создан робот-пылесос, самостоятельность работы которого обеспечена специальной программой во встроенном мини-компьютере.

Как устроен робот-пылесос?
Внешне прибор обычно имеет форму диска (хотя существуют агрегаты в форме квадрата, например Neato VX-21), диаметр колеблется от 250 до 350 мм, высота не превышает 130 мм.
Любой робот-пылесос состоит из нескольких конструктивных элементов. Их функционирование обеспечивает качество конечного результата его работы. Робот устроен следующим образом:
- источник питания или аккумуляторная батарея;
- механизмы привода, обеспечивающие движение щеток и вращение колес;
- навигационная система;
- чистящий модуль.
Чистящий модуль состоит из:
- Основных щеток: ворсяная, собирающая мелкие загрязнения и шерсть; резиновая, удаляющая более крупные фракции мусора, например крошки или песок.
- Боковые щетки. Основное назначение — уборка в непосредственной близости от стен помещения.
- Фильтры (простые или многослойные типа «Hepa»).
- Контейнер объемом 0,4–1,0 литра.
- Электрический двигатель (N=0,40–0,65 кВт).

Принцип работы
Ни одна, даже самая «продвинутая» модель роботизированного пылесоса, не заменит наведения порядка в помещении. Поэтому робот-пылесос, принцип работы которого приведен ниже, является лишь средством поддержания чистоты.
В процессе движения по запрограммированному маршруту, агрегат с помощью щеток собирает в специальный контейнер мусор и пыль. Предварительно мусор пропускается через несколько ступеней фильтрационной системы. Модели, обладающий функцией моющего пылесоса, распыляют раствор моющего средства с последующим его сбором специальной салфеткой (щеткой).
Навигационная система
Ориентация прибора в пространстве является важнейшей характеристикой, определяющей не только качество выполненной работы, но и возможность ее выполнения в принципе.

Производители применяют следующие навигационные системы в работе пылесоса.
Внутренние датчики
Динамическая навигация по датчикам, установленным в роботе-пылесосе. Это — датчики столкновения, инфракрасные датчики падения и касания, ультразвуковые или эхолокационные датчики, датчики загрязнения, обеспечивающие оптимальность уборочного процесса, лазерные датчики-сканеры и т.д. Эффективность данной навигационной системы определяется как количеством и типами установленных датчиков, так и скоростью обработки процессором поступающих от них сигналов.
Внешние датчики
Динамическая навигация с применением двух типов внешних датчиков, обеспечивающих зональное разделение пространства: датчиков-маяков (координаторов движения), позволяющих сделать быструю и высококачественную уборку и датчиков-ограничителей движения (виртуальных стен), ограничивающих зону уборки.Внешние датчики представляют пластиковый контейнер, генерирующий безопасный для здоровья и невидимый человеческому глазу инфракрасный луч.
Датчики-маяки дополнительно генерируют два луча, чем обеспечивают ориентацию робота в зоне. При захвате луча, сгенерированного виртуальной стеной, робот просто меняет направление движения.
Лазер
Данная система позиционируется как наиболее современная и обеспечивает формирование в памяти компьютера карту помещения посредством измерения расстояний до выбранных предметов при помощи лазерных дальномеров, установленных на пылесосе.
Камера
Установка камеры производится в наивысшей точке прибора, что дает ей возможность «посмотреть» вокруг и позволяет считывать показания со стен или потолка. Рабочий процесс выполняется исключительно по прямым линиям.
Процесс уборки
Классическая схема процесса уборки достаточно проста:
- Двигаясь по заданному маршруту боковая щетка сметает попадающуюся на пути грязь в зону действия основной щетки.
- Благодаря ворсистой структуре центральная щетка подбрасывает загрязнения (пыль, грязь, шерсть, волосы и т.п.), что обеспечивает их подхватывание воздушным потоком.
- Далее воздушный поток, пройдя через фильтрационную систему, попадает наружу, а грязь (пыль) оседает и прессуется в контейнере мусоросборника.

Возвращение на базу для подзарядки
В обеспечении непрерывности процесса уборки помещения немаловажная роль отводится контролю заряда аккумуляторной батареи. В случае понижения уровня заряда до минимального, устройство начинает поиск сигнала базы с помощью специального датчика. Обнаружив сигнал, робот-пылесос направляется к базе и производит стыковку. Для полной зарядки аккумулятора может понадобиться 3–12 часов, в зависимости от модели прибора. Агрегаты, осуществляющие навигацию посредством лазерных систем или видеокамер, способны запоминать и вносить в карту месторасположение базы, что существенно облегчает путь к ней.
В комплектацию некоторых моделей роботов-пылесосов включен сетевой адаптер. Он дает возможность зарядить прибор от сети 220 Вт и обеспечить работу в случае отсутствия или неисправности базы.
Видео работы робота-пылесоса
Сделаем заключение об устройстве и принципе действия современных роботов-пылесосов. При всем многообразии конструкций, вариантов комплектации и наличии опций, основными критериями, которые влияют на популярность моделей, остается соотношение цены и качества.
tehnopomosh.com




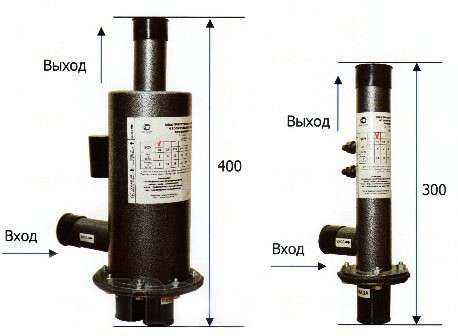






Карта сайта

г.Краснодар, ул.Симферопольская дом 5, офис 9
![]() 8 (989) 212 27 02
8 (989) 212 27 02 ![]() 8 (861) 260 24 40
8 (861) 260 24 40
