ул.Симферопольская
дом 5, офис 9
![]() Корзина
Корзина
Корзина пуста
Выбор электродвигателя и расчет его рабочих параметров. Как выбрать электродвигатель по мощности
Выбор электродвигателя, как подобрать электродвигатель, советы.
Выбор электродвигателя и расчет его рабочих параметров
Как правильно подобрать электродвигатель для оптимального и безаварийного функционирования системы «двигатель – нагрузка»? Как повысить надежность системы в целом? Какие условия должны быть учтены в первую очередь? Как уменьшить пусковой ток, увеличить пусковой момент или обеспечить плавность пуска? Это далеко неполный список вопросов, которые задают покупатели, обращаясь в нашу компанию. В данной статье мы постараемся максимально полно ответить на эти вопросы. Мы надеемся, что статья будет полезна Вам и поможет решить ряд проблем, возникающих как при эксплуатации старых, так и выборе новых электродвигателей.
Правильность подбора электродвигателя, учитывающая специфику приводного механизма, условия работы и окружающей среды, определяет длительность безаварийной работы и надежность системы «двигатель – нагрузка».
Далее приведены рекомендации по выбору электродвигателя (последовательность, в которой они представлены, не является обязательной).
На первом этапе необходимо определиться с типом электрического двигателя. Ниже даны краткое описание, преимущества и недостатки, сферы предпочтительного применения основных типов двигателей.
Типы электрических двигателей
1. Двигатели постоянного тока.
Основным преимуществом данных двигателей, которое определяло повсеместное их использование на этапе развития электрических приводов, является легкость плавного регулирования скорости в широких пределах. Поэтому с развитием полупроводниковой промышленности и появлением относительно недорогих преобразователей частоты процент их использования постоянно уменьшается. Там, где это возможно двигатели постоянного тока заменяются приводами на основе асинхронных двигателей с короткозамкнутым ротором. Основные недостатки двигателя постоянного тока (невысокая надежность, сложность обслуживания и эксплуатации) обусловлены наличием коллекторного узла. Кроме того, для питания двигателя необходим источник постоянного тока или тиристорный преобразователь переменного напряжения в постоянное. При всех своих недостатках двигатели постоянного тока обладают высоким пусковым моментом и большой перегрузочной способностью. Что определило их использование в металлургической промышленности, станкостроении и на электротранспорте.
2. Синхронные двигатели.
Основным преимуществом данных двигателей является то, что они могут работать с коэффициентом мощности cosφ=1, а в режиме перевозбуждения даже отдавать реактивную мощность в сеть, что благоприятно сказывается на характеристиках сети: увеличивается ее коэффициент мощности, уменьшаются потери и падение напряжения. Кроме того, синхронные двигатели устойчивы к колебаниям сети. Максимальный момент синхронного двигателя пропорционален напряжению, при этом момент асинхронного двигателя пропорционален квадрату напряжения. Следовательно, при снижении напряжения синхронный двигатель сохраняет большую перегрузочную способность, а возможность форсировки возбуждения увеличивает надежность их работы при аварийных понижениях напряжения. Больший воздушный зазор по сравнению с асинхронным двигателем и применение постоянных магнитов делает КПД синхронных двигателей выше. Их особенностью также является постоянство скорости вращения при изменении момента нагрузки на валу.
При всех достоинствах синхронного двигателя основными недостатками, ограничивающими их применение являются сложность конструкции, наличие возбудителя, высокая цена, сложность пуска.
Поэтому синхронные двигатели преимущественно используются при мощностях свыше 100 кВт.
Основное применение – насосы, компрессоры, вентиляторы, двигатель-генераторные установки.
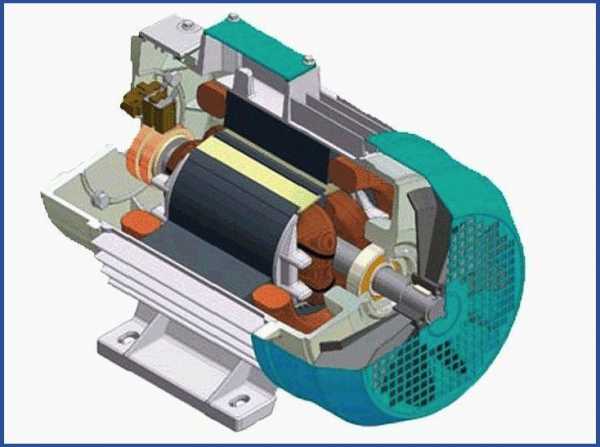
3. Асинхронные двигатели.
По конструктивному принципу асинхронные двигатели подразделяются на двигатели с короткозамкнутым и фазным ротором. При этом большинство используемых электродвигателей являются асинхронными с короткозамкнутым ротором. Столь широкое применение обусловлено простотой их конструкции, обслуживания и эксплуатации, высокой надежностью, относительно низкой стоимостью. Недостатками таких двигателей являются большой пусковой ток, относительно малый пусковой момент, чувствительность к изменениям параметров сети, а для плавного регулирования скорости необходим преобразователь частоты. Кроме того, асинхронные двигатели потребляют реактивную мощность из сети. Предел применения асинхронных электродвигателей с короткозамкнутым ротором определяется мощностью системы электроснабжения конкретного предприятия, так как большие пусковые токи при малой мощности системы создают большие понижения напряжения.
Использование асинхронных двигателей с фазным ротором помогает снизить пусковой ток и существенно увеличить пусковой момент, благодаря введению в цепь ротора пусковых реостатов. Однако, ввиду усложнения их конструкции, и как следствие, увеличения стоимости их применение ограничено. Основное применение – приводы механизмов с особо тяжелыми условиями пуска. Для уменьшения пусковых токов асинхронного двигателя с короткозамкнутым ротором может быть использовано устройство плавного пуска или преобразователь частоты.
В системах, где необходимо ступенчатое изменение скорости (например, лифты) используют многоскоростные асинхронные двигатели. В механизмах, требующих остановки за определенное время и фиксации вала при исчезновении напряжения питания, применяются асинхронные двигатели с электромагнитным тормозом (металлообрабатывающие станки, лебедки). Существуют также асинхронные двигатели с повышенным скольжением, которые предназначены для работы в повторно-кратковременных режимах, а также режимах с пульсирующей нагрузкой.
После того, как определен тип электродвигателя, полностью учитывающий специфику рабочего механизма и условия работы, необходимо определиться с рабочими параметрами двигателя: мощностью, номинальным и пусковым моментами, номинальными напряжением и током, режимом работы, коэффициентом мощности, классом энергоэффективности.
Мощность и моменты
В общем случае для квалифицированного подбора электродвигателя должна быть известна нагрузочная диаграмма механизма. Однако, в случае постоянной или слабо меняющейся нагрузки без регулирования скорости достаточно рассчитать требуемую мощность по теоретическим или эмпирическим формулам, зная рабочие параметры нагрузки. Ниже приведены формулы для расчета мощности двигателя P2 [кВт] некоторых механизмов.
1. Вентилятор.
,
где Q [м3/с] – производительность вентилятора, Н [Па] – давление на выходе вентилятора, ηвент, ηпер – КПД вентилятора и передаточного механизма соответственно, kз – коэффициент запаса.
2. Насос
,
где Q [м3/с] – производительность насоса, g=9,8 м/с2 – ускорение свободного падения, H [м] – расчетная высота подъема, ρ [кг/м3] – плотность перекачиваемой жидкости, ηнас, ηпер – КПД насоса и передаточного механизма соответственно, kз – коэффициент запаса.
3. Поршневой компрессор
,
где Q [м3/с] – производительность компрессора, А [Дж/м3] – работа изотермического и адиабатического сжатия атмосферного воздуха объемом 1 м3 давлением 1,1·105 Па до требуемого давления, ηкомпр, ηпер – КПД компрессора и передаточного механизма соответственно, kз – коэффициент запаса.
Кроме того, необходимо сопоставить пусковой момент двигателя (особенно в случае асинхронного с короткозамкнутым ротором) и рабочего механизма, так как некоторые механизмы имеют повышенное сопротивление в момент трогания. Следует иметь в виду и то обстоятельство, что при замене трехфазного асинхронного двигателя на однофазный пусковой момент последнего почти в три раза меньше и механизм, успешно функционировавший ранее, может не тронуться с места.
Развиваемый электродвигателем момент M [Нм] и полезная мощность на валу Р2 [кВт] связаны следующим соотношением
Полная мощность, потребляемая из сети:
1. для двигателей постоянного тока (она же активная)
2. для двигателей переменного тока
при этом потребляемые активная и реактивная мощности соответственно
В случае синхронного двигателя значение Q1 может получиться отрицательным, это означает, что двигатель отдает реактивную мощность в сеть.
Важно отметить следующее. Не следует выбирать двигатель с большим запасом по мощности, так как это приведет к снижению его КПД, а в случае двигателя переменного тока также к снижению коэффициента мощности.
Напряжение и ток
При выборе напряжения электродвигателя необходимо учитывать возможности системы энергоснабжения предприятия. При этом нецелесообразно при больших мощностях выбирать двигатель с низким напряжением, так как это приведет к неоправданному удорожанию не только двигателя, но и питающих проводов и коммутационной аппаратуры вследствие увеличения расхода меди.
Если при трогании момент сопротивления нагрузки невелик и для уменьшения пусковых токов асинхронного двигателя с короткозамкнутым ротором может быть применен способ пуска с переключением со «звезды» на «треугольник», необходимо предусмотреть вывод в клеммную коробку всех шести зажимов обмотки статора. В общем случае применение схемы соединения «звезда» является предпочтительным, так как в схеме «треугольник» имеется контур для протекания токов нулевой последовательности, которые приводят к нагреву обмотки и снижению КПД двигателя, в соединении «звезда» такой контур отсутствует.
Режим работы
Нагрузка электродвигателя в процессе работы может изменяться различным образом. ГОСТом предусмотрены восемь режимов работы.
1. Продолжительный S1 – режим работы при постоянной нагрузке в течение времени, за которое температура двигателя достигает установившегося значения. Мощность двигателя, работающего в данном режиме, рассчитывается исходя из потребляемой механизмом мощности. Формулы расчета мощности некоторых механизмов (насос, вентилятор, компрессор) приведены выше.
2. Кратковременный S2 – режим, при котором за время включения на постоянную нагрузку температура двигателя не успевает достичь установившегося значения, а за время отключения двигатель охлаждается до температуры окружающей среды. В случае использования двигателя S1 для работы в режиме S2 необходимо проверить его только по перегрузочной способности, так как температура не успевает достичь допустимого значения.
3. Повторно-кратковременный S3 – режим с периодическим отключением двигателя, при котором за время включения температура не успевает достичь установившегося значения, а за время отключения – температуры окружающей среды. Расчет мощности электродвигателя обычного исполнения для работы в режиме S3 производится по методам эквивалентных величин с учетом пауз и потерь в переходных режимах. Кроме того, двигатель необходимо проверить на допустимое число включений в час. В случае большого числа включений в час рекомендуется использовать двигатели с повышенным скольжением. Данные электродвигатели обладают повышенным сопротивлением обмотки ротора, а, следовательно, меньшими пусковыми и тормозными потерями.
4. Повторно-кратковременный с частыми пусками S4 и повторно-кратковременный с частыми пусками и электрическим торможением S5. Данные режимы рассматриваются аналогично режиму S3.
5. Перемежающийся S6 – режим, при котором работа двигателя под нагрузкой, периодически заменяется работой на холостом ходу. Большинство двигателей, работающих в продолжительном режиме, имеют меняющийся график нагрузки.
При этом для обоснованного выбора двигателя с целью оптимального его использования рекомендуется применять методы эквивалентных величин.
Класс энергоэффективности
В настоящее время вопросам энергоэффективности уделяется огромное внимание. При этом под энергоэффективностью понимается рациональное использование энергетических ресурсов, с помощью которого достигается уменьшение потребления энергии при том же уровне мощности нагрузки. Основным показателем энергоэффективности двигателя является его коэффициент полезного действия
,
где Р2 – полезная мощность на валу, Р1 – потребляемая активная мощность из сети.
Стандартом IEC 60034-30 для асинхронных электродвигателей с короткозамкнутым ротором были установлены три класса энергоэффективности: IE1, IE2, IE3.
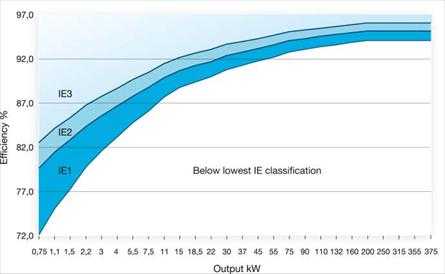
Рис. 1. Классы энергоэффективности
Так, например, использование двигателя мощностью 55 кВт повышенного класса энергоэффективности позволяет сэкономить около 8000 кВт в год от одного двигателя.
Степень защиты IP, виды климатических условий и категорий размещения
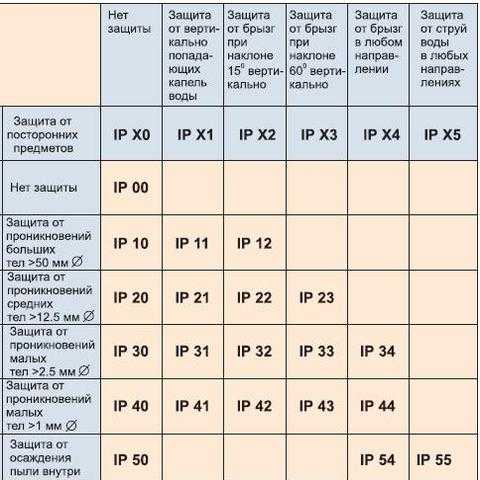
ГОСТ Р МЭК 60034-5 – 2007 устанавливает классификацию степеней защиты, обеспечиваемых оболочками машин.
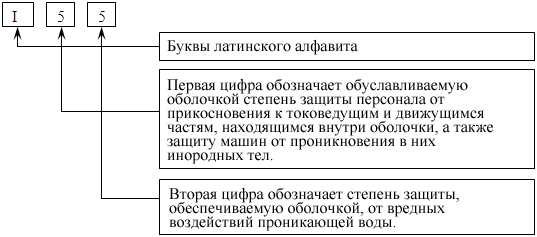
Обозначение степени защиты состоит из букв латинского алфавита IP и последующих двух цифр (например, IP55).
Большинство электродвигателей, выпускаемых в настоящее время, имеют степени защиты IP54 и IP55.
Категория размещения обозначается цифрой: 1 – на открытом воздухе; 2 – под навесом при отсутствии прямого солнечного воздействия и атмосферных осадков; 3 – в закрытых помещениях без искусственного регулирования климатических условий; 4 – в закрытых помещениях с искусственно регулируемыми климатическими условиями.
Климатические условия: У – умеренный климат; УХЛ – умеренно холодный климат; ХЛ – холодный климат; Т – тропический климат.
Таким образом, при выборе электродвигателя необходимо учитывать условия окружающей среды (температура, влажность), а также необходимость защиты двигателя от воздействия инородных предметов и воды.
Например, использование электродвигателя с типом климатического исполнения и категорией размещения У3 на открытом воздухе является недопустимым.
Усилия, действующие на вал двигателя со стороны нагрузки
Наиболее нагруженными в двигателе являются подшипниковые узлы. Поэтому при выборе двигателя должны быть учтены радиальные и осевые усилия, действующие на рабочий конец вала двигателя со стороны нагрузки. Превышения допустимых значений сил приводит к ускоренному выходу из строя не только подшипников, но и всего двигателя (например, задевание ротора о статор).
Обычно допустимые значения сил для каждого подшипника приведены в каталогах. Рекомендуется в случае повышенных радиальных усилий (ременная передача) на рабочий конец вала установить роликовый подшипник, при этом предпочтительным является двигатель с чугунными подшипниковыми щитами.
Особенности конструкции двигателя при работе от преобразователя частоты
В настоящее время все большее распространение приобретает использование частотно-регулируемого привода (ЧРП), выполненного на основе асинхронного электродвигателя с короткозамкнутым ротором.
При использовании частотно-регулируемого привода достигается:
- 1. экономия электроэнергии;
- 2. плавность пуска и снижение пусковых токов;
- 3. увеличение срока службы двигателя.
В общем случае стандартный электродвигатель нельзя использовать в составе частотно-регулируемого привода, так как при уменьшении скорости вращения снижается эффективность охлаждения. При регулировании скорости вверх от номинальной резко увеличивается нагрузка от собственного вентилятора. В обоих случаях уменьшается нагрузочная способность двигателя. Кроме того, в случае использования двигателя в системах точного регулирования необходим датчик положения ротора двигателя.
При работе электродвигателя от преобразователя частоты в контуре вал – фундаментная плита могут протекать токи. При этом возникает точечная эрозия на шариках и роликах, на беговых кольцах подшипников качения, а также на баббитовой поверхности подшипников скольжения. От электролиза смазка чернеет, подшипники греются. Для разрыва контура прохождения подшипниковых токов на неприводной конец вала устанавливается изолированный подшипник. При этом по условиям безопасности установка изолированных подшипников с двух сторон двигателя не допустима.
Величина подшипниковых токов становится опасной для безаварийной работы двигателя при напряжении между противоположными концами вала более 0,5 В. Поэтому установка изолированного подшипника обычно требуется для электродвигателей с высотой оси вращения более 280 мм.
Примечание
Необходимо отметить, что в случае отклонения условий эксплуатации двигателя (например, температуры окружающей среды или высоты над уровнем моря), мощность нагрузки должна быть изменена. Кроме того, при снижении мощности нагрузки в определенные моменты времени для рационального использования двигателя может быть изменена схема соединения обмотки, а, следовательно, и фазное напряжение.
В случае возникновения вопросов, а также необходимости расчета параметров двигателя для Вашего нагрузочного механизма обращайтесь в наш технический отдел по координатам, приведенным на сайте в разделе «Контакты».
www.szemo.ru
Как подобрать электродвигатель по параметрам- Советы электрика
Возникают ситуации, когда выходит из строя электродвигатель, который был выпущен еще в советское время. Сразу конечно проще и дешевле будет попытаться его отремонтировать по этой инструкции для асинхронных моторов или по этой— для синхронных моделей.
Но если есть не устраняемые повреждения корпуса, фазного ротора и т. п., тогда придется покупать новый взамен старому, а это не так то просто будет сделать, как может показаться на первый взгляд.
Из этой статьи Вы узнаете как правильно подобрать и заменить электродвигатель асинхронного типа, которые стоят в сборе с насосами, на компрессорах, станках, некоторых моделях стиральных машин и т. д.
Синхронные электромоторы стоят в бытовой технике и электроинструменте, поэтому найти и заменить Вам поможет сервисный центр производителя. А на распространенные модели, например электроинструмента Makita и Bosch- запчасти Вы без труда найдете и на рынке.
Подбор электродвигателя по параметрам на шильде
На каждом модели электродвигателя есть шильдик или металлическая пластина, на которой указывается модель мотора и все его основные технические характеристики.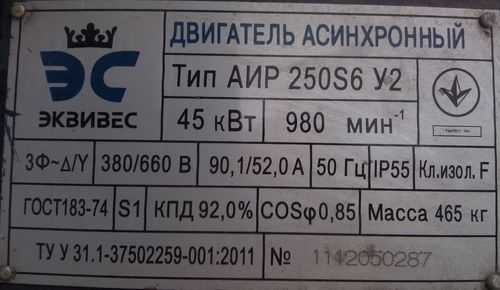
Новые модели электродвигателей выпускаются с меньшими габаритами и размерами устройств соединения с приводом. Поэтому аналог старому электродвигателю подобраться не удастся. Придется мудрить при установке электродвигателя: либо установить переходную пластину для крепления болтами мотора к станине, либо необходимо будет расточить отверстие полумуфты под размер вала и шпоночный паз.
Параметры подбора электродвигателя:
- Серия электродвигателя, например АО, АИР, АМУ, АОД, и т. д. Это очень важный параметр, потому что каждая серия обладает своими индивидуальными характеристиками: режим работы и запуска, с повышенным скольжением или пусковым моментом, наличие переключения скоростей, электрического тормоза и т. п. Поэтому для безотказной и эффективной работы выбирайте двигатель из такой же серии или аналогичной по характеристикам.
- Варианты монтажа на лапы, большой или малый фланец, с одним или двумя концами вала и т. п.
- Выбор по мощности. Номинальная мощность электродвигателя- Pном в кВт указывается на шильдике, только не путайте ее с мощностью передаваемой на вал. Очень важно подбирать электродвигатель точно по той мощности, которая необходима, избегая ее занижения или преувеличения.
- Рабочее напряжение. Мотор может быть рассчитан только на работу от одного напряжения величиной 220 В или 380 В, или на двойное- по схеме звезда-треугольник 220/380 Вольт или 380/660 В.
- Частота вращения вала, которая может быть максимум 3000 оборотов в минуту, 1400, 900 и т. д. Очень важный параметр, потому что частота вращения вала электродвигателя должна точно соответствовать необходимой величине для приводимых им устройств.
- Степень защиты от внешних воздействий, указывающая на защищенность электромотора от пыли, струй воды и т. п.
 Например, с IP54 можно использовать электродвигатель во влажных помещениях и на улице под дождем, но нет защиты от струй воды.
Например, с IP54 можно использовать электродвигатель во влажных помещениях и на улице под дождем, но нет защиты от струй воды. - Варианты климатического исполнения— для Украины, Республики Беларусь и средней полосы России, как правило применяется УХЛ — холодный климат с рабочими температурами от +40 до -60 градусов С. Есть еще У — умеренный климат (+40… -45 гр. С) , Т — тропический климат (+50… -10 гр. С) и ОМ — морской климат (+45… -40 гр. С).
- Второстепенные параметры, есть модели 2ух, 3х, 4х скоростные, с повышенным скольжением или пусковым моментом и т. п. Как правило, необходимы для работы на производстве.
Я не выделял отдельно параметры КПД- коэффициент полезного действия и cos φ — коэффициент мощности. При выборе они не имеют значения, потому что у современных моделей эти характеристики будут все равно лучше.
Подбор электродвигателя по параметрам, если нет шильдика
При отсутствии таблички или шильды с техническими параметрами на электродвигателе, подобрать замену гораздо сложнее.Сразу необходимо будет узнать рабочее напряжение, мощность и частоту (количество оборотов) вращения вала, а также необходимость для электродвигателя — в увеличенном пусковом моменте, повышенном скольжении, нескольких скоростях и т. п.
Далее необходимо измерить основные размеры:
- Диаметр вала и его высоту (размер от его центра до «пола»).
- Вылет вала или длину его выступающей части.
- Расстояния крепежных отверстий и размер от вала до центра первого отверстия на лапе.
- При наличии фланца. Необходимо измерить его диаметр и расстояния по центрам крепежных отверстий.
После того как снимете все размеры и узнаете технические характеристики электродвигателя- переходите к подбору по справочнику. Электронную версию Вы найдете здесь.
jelektro.ru
Расчет мощности электродвигателя - ElectrikTop.ru

Если вы задались целью создать электрический привод, например, собственную мельницу, насосную станцию, транспортерную ленту или другое полезное в хозяйстве устройство, вам надо найти или купить электродвигатель и убедиться в том, что его мощность соответствует поставленным задачам.
Сегодня мы осветим некоторые аспекты, касающиеся устройства и рабочих качеств электрических машин, что поможет вам сделать правильный выбор.
Как выбрать электродвигатель
Подбор электродвигателя стоит начать со знакомства с типами электрических машин. Основное их отличие состоит в способе взаимодействия магнитных полей статора и ротора. По этому признаку они делятся на два типа:
- Синхронные.
- Асинхронные.
Синхронные электрические машины
У них магнитное поле статора и ротора создается внешними источниками, они независимы друг от друга, их смена положения их полюсов происходит синхронно.
Двигатели постоянного тока
Исходя из принципа механики Ньютона, утверждающего, что всякое движение относительно, электродвигатель постоянного тока можно назвать синхронной машиной. Хотя магнитные поля статора и ротора в ней неподвижные, а вращение вала происходит за счет эффекта отталкивания одноименных полюсов магнитов и притягивания разноименных.
 Синхронизация их положения относительно друг друга происходит особого устройства – коллектора, расположенного на валу ротора. Это кольцо из меди, поделенное на секторы диэлектриком. Концы обмоток ротора подключаются к этим секторам и создают контактные пары.
Синхронизация их положения относительно друг друга происходит особого устройства – коллектора, расположенного на валу ротора. Это кольцо из меди, поделенное на секторы диэлектриком. Концы обмоток ротора подключаются к этим секторам и создают контактные пары.
На них через угольные щетки подается постоянный ток. Во время вращения вала происходит переключение полюсов между парами. Магнитное поле статора может создаваться металлами с остаточным магнетизмом или прохождением тока по обмоткам. Последние применяются в электрических машинах большой мощности.
Их достоинством является большой коэффициент полезного действия, до 98%, а также стабильно высокий вращающий момент и малая зависимость от перегрузок. Двигатели постоянного тока отлично подходят для привода подъемных механизмов, а также в качестве тяговых на электротранспорте.
Ими очень просто управлять: для снижения скорости вращения надо лишь уменьшить величину подаваемого напряжения, а для реверсирования достаточно сменить полярность. Недостатком является сложность устройства и невысокая надежность щеточного узла, его склонность к искрению и шумность. Кроме того, постоянное напряжение сложно передавать на большие расстояния, из-за чего нет магистральных линий такого типа. Питание придется создавать самостоятельно, используя выпрямительные или инверторные схемы. Также про двигатели постоянного тока можно почитать здесь.
Коллекторные двигатели
По своей конструкции они аналогичны двигателям постоянного тока. Однако питаются переменным однофазным током. Статорная обмотка возбуждения у них включена последовательно с обмоткой якоря. Вращение вала происходит за счет синхронной смены полюсов магнитного поля в статорной и роторной обмотках.
К перечисленным выше достоинствам – большому вращающему моменту, нечувствительности к перегрузкам, стоит отнести и то, что это единственная электрическая машина переменного тока, которой можно без проблем управлять.
Для изменения скорости вращения вала достаточно уменьшить питающее напряжение, а для реверсирования поменять местами точки подключения коллекторного узла со статорной обмоткой. Поэтому коллекторные электродвигатели широко применяются в бытовых электроприборах.
Например, в стиральных машинах, дрелях и другом электрифицированном инструменте. К недостаткам, основным из которых является сложность и малая надежность щеточного узла, стоит отнести и невозможность подключения трехфазного напряжения. Просто потому, что в этом случае щеток должно быть шесть. Это ограничивает максимальную мощность двигателей: у однофазных машин при напряжении 220 вольт это значение не бывает более 2,5 киловатта.
Синхронные электродвигатели переменного тока
 У них статорная обмотка питается переменным трехфазным током, а роторная – постоянным. Чтобы их магнитные полюса сцепились и вызвали движение вала, такой электродвигатель надо раскрутить вручную или другим мотором. Фактически они являются генератором переменного тока, работающим в режиме вращения. Достоинством машины являются высокий крутящий момент и стабильность частоты вращения.
У них статорная обмотка питается переменным трехфазным током, а роторная – постоянным. Чтобы их магнитные полюса сцепились и вызвали движение вала, такой электродвигатель надо раскрутить вручную или другим мотором. Фактически они являются генератором переменного тока, работающим в режиме вращения. Достоинством машины являются высокий крутящий момент и стабильность частоты вращения.
Недостатками – сложность пуска и наличие коллектора со щеточным узлом, что снижает их надежность. А также невозможность регулирования частоты вращения. Применяются в установках, которые работают постоянно или с очень длительным рабочим циклом. Например, на перекачивающих станциях или транспортерных лентах.
Узнать больше об электродвигателях можно узнать в нашей статье «Электрический двигатель: виды и характеристики».
Асинхронные электрические машины
В них магнитное поле ротора является порождением вращающегося магнитного поля статора. Поскольку между этими деталями машины есть воздушный зазор, передача энергии между ними происходит с потерями. Поэтому фаза тока в роторе отстает от фазы тока в статоре на небольшой угол (не более 100), который определяет величину коэффициента мощности cosφ. Это отставание и является причиной того, что электрическую машину этого типа называют асинхронной.
Двигатели с короткозамкнутым ротором
Обмотка ротора у них – это набор металлических стержней, которые соединяют два кольца. Получившуюся фигуру называют «беличье колесо». В момент подачи напряжения на статорную обмотку в роторе возникает ток короткого замыкания, энергия которого тратится на раскручивании вала и тем самым гасится. У него несколько меньший КПД, чем у синхронных машин, он не превышает 80%.
 После набора оборотов он имеет очень стабильный вращающий момент на валу и хорошо выдерживает перегрузки. Главными достоинствами таких двигателей является его простота и надежность, благодаря которым они очень широко распространены. Недостатками – сложность управления.
После набора оборотов он имеет очень стабильный вращающий момент на валу и хорошо выдерживает перегрузки. Главными достоинствами таких двигателей является его простота и надежность, благодаря которым они очень широко распространены. Недостатками – сложность управления.
Для изменения скорости вращения необходимо менять частоту питающего напряжения или количество статорных обмоток, которое определяет количество полюсов электромагнита – чем их больше, тем она ниже. Также электродвигателям с короткозамкнутым ротором свойственен большой пусковой ток, перегружающий сеть, а также резкий рост вращающего момента при подключении питания, что может вызвать поломку редуктора привода.
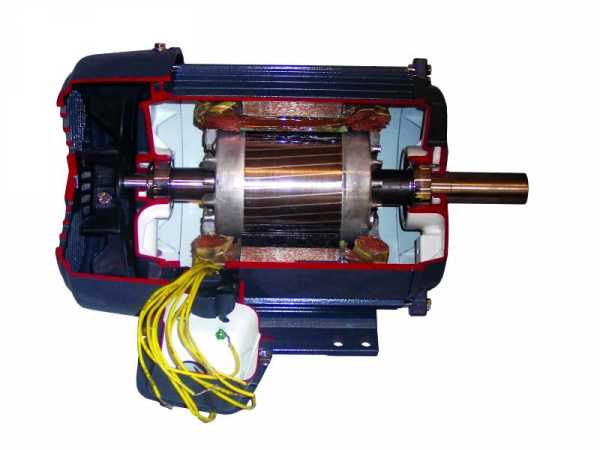
Двигатели с фазным ротором
Пуск асинхронных двигателей с короткозамкнутым ротором большой мощности (более 30 кВт) связан с чрезвычайной перегрузкой питающей сети. Для устранения этого явления используют машины с фазным ротором, обмотка которых состоит из трех катушек, соединенных звездой. Их концы соединены угольными щетками с тремя контактными кольцами, расположенными на оси двигателя.
 В отличие от коллектора двигателя постоянного тока они не поделены на сектора. При запуске такой машины используется трехфазный реостат, сопротивление которого в момент пуска максимальное. Постепенно уменьшая активное сопротивление ротора, добиваются плавной раскрутки вала электродвигателя. При достижении номинальных оборотов его закорачивают.
В отличие от коллектора двигателя постоянного тока они не поделены на сектора. При запуске такой машины используется трехфазный реостат, сопротивление которого в момент пуска максимальное. Постепенно уменьшая активное сопротивление ротора, добиваются плавной раскрутки вала электродвигателя. При достижении номинальных оборотов его закорачивают.
Изменяя сопротивление ротора, можно добиться изменения частоты вращения. Достоинством машины такого типа является отсутствие перегрузки в момент запуска и плавное нарастание вращающего момента. Поэтому ее применяют в грузоподъемном оборудовании. Недостаток – сложность устройства и более низкий, чем у машин с короткозамкнутым ротором КПД, он не более 60%.
Читайте также «Как работает асинхронный электродвигатель».
Как рассчитать мощность электродвигателя
При расчете мощности электродвигателя надо ориентироваться на потребности обеспечиваемого технологического процесса. В Сети так много методичек для определения этого параметра, что вы можете запутаться окончательно. Предлагаем вам довольно простую универсальную формулу, пригодную для любых случаев.
P = T ∙ Ω
P – мощность электродвигателя. Т – потребный вращающий момент на валу, а Ω – угловая скорость.
T = Ft ∙ R
Ft– потребное тяговое усилие, оно рассчитывается по формуле: Ft= t ∙ M ∙ 2.5, где t – коэффициент трения (для подшипников качения он равен 0.02), М – масса перемещаемого груза, а 2.5 – это коэффициент Ньютона. R – радиус рабочего органа, например, крыльчатки насоса.
Ω = π ∙ n / 30, где π = 3.14, а n – паспортная частота вращения приводимого в действие устройства.Полученное значение лучше увеличить в 1,5 раза, чтобы предусмотреть возможные перегрузки во время работы привода.
При расчете рабочего тока электродвигателя необходимо учитывать, что при соединении обмоток статора асинхронного электродвигателя звездой он в 1,73 раза меньше, чем при соединении треугольником. На эту же величину уменьшается и мощность.
Окончательно убедиться в работоспособности созданного привода вы сможете только на практике. Но если вы будете следовать изложенным выше рекомендациям, то вероятность того, что все будет работать как надо без дополнительных переделок, значительно повысится.
electriktop.ru
Выбор электродвигателя и расчет его рабочих параметров
Правильность подбора электродвигателя, учитывающая специфику приводного механизма, условия работы и окружающей среды, определяет длительность безаварийной работы и надежность системы «двигатель – нагрузка».
Далее приведены рекомендации по выбору электродвигателя (последовательность, в которой они представлены, не является обязательной).
На первом этапе необходимо определиться с типом электрического двигателя. Ниже даны краткое описание, преимущества и недостатки, сферы предпочтительного применения основных типов двигателей.
Типы электрических двигателей
-
Двигатели постоянного тока
Основным преимуществом данных двигателей, которое определяло повсеместное их использование на этапе развития электрических приводов, является легкость плавного регулирования скорости в широких пределах. Поэтому с развитием полупроводниковой промышленности и появлением относительно недорогих преобразователей частоты процент их использования постоянно уменьшается. Там, где это возможно двигатели постоянного тока заменяются приводами на основе асинхронных двигателей с короткозамкнутым ротором.
Основные недостатки двигателя постоянного тока (невысокая надежность, сложность обслуживания и эксплуатации) обусловлены наличием коллекторного узла. Кроме того, для питания двигателя необходим источник постоянного тока или тиристорный преобразователь переменного напряжения в постоянное. При всех своих недостатках двигатели постоянного тока обладают высоким пусковым моментом и большой перегрузочной способностью. Что определило их использование в металлургической промышленности, станкостроении и на электротранспорте.
-
Синхронные двигатели
Основным преимуществом данных двигателей является то, что они могут работать с коэффициентом мощности cosφ=1, а в режиме перевозбуждения даже отдавать реактивную мощность в сеть, что благоприятно сказывается на характеристиках сети: увеличивается ее коэффициент мощности, уменьшаются потери и падение напряжения. Кроме того, синхронные двигатели устойчивы к колебаниям сети. Максимальный момент синхронного двигателя пропорционален напряжению, при этом момент асинхронного двигателя пропорционален квадрату напряжения. Следовательно, при снижении напряжения синхронный двигатель сохраняет большую перегрузочную способность, а возможность форсировки возбуждения увеличивает надежность их работы при аварийных понижениях напряжения. Больший воздушный зазор по сравнению с асинхронным двигателем и применение постоянных магнитов делает КПД синхронных двигателей выше. Их особенностью также является постоянство скорости вращения при изменении момента нагрузки на валу.
При всех достоинствах синхронного двигателя основными недостатками, ограничивающими их применение являются сложность конструкции, наличие возбудителя, высокая цена, сложность пуска. Поэтому синхронные двигатели преимущественно используются при мощностях свыше 100 кВт.
Основное применение – насосы, компрессоры, вентиляторы, двигатель-генераторные установки.
-
Асинхронные двигатели
По конструктивному принципу асинхронные двигатели подразделяются на двигатели с короткозамкнутым и фазным ротором. При этом большинство используемых электродвигателей являются асинхронными с короткозамкнутым ротором. Столь широкое применение обусловлено простотой их конструкции, обслуживания и эксплуатации, высокой надежностью, относительно низкой стоимостью. Недостатками таких двигателей являются большой пусковой ток, относительно малый пусковой момент, чувствительность к изменениям параметров сети, а для плавного регулирования скорости необходим преобразователь частоты. Кроме того, асинхронные двигатели потребляют реактивную мощность из сети. Предел применения асинхронных электродвигателей с короткозамкнутым ротором определяется мощностью системы электроснабжения конкретного предприятия, так как большие пусковые токи при малой мощности системы создают большие понижения напряжения.
Использование асинхронных двигателей с фазным ротором помогает снизить пусковой ток и существенно увеличить пусковой момент, благодаря введению в цепь ротора пусковых реостатов. Однако, ввиду усложнения их конструкции, и как следствие, увеличения стоимости их применение ограничено. Основное применение – приводы механизмов с особо тяжелыми условиями пуска. Для уменьшения пусковых токов асинхронного двигателя с короткозамкнутым ротором может быть использовано устройство плавного пуска или преобразователь частоты.
В системах, где необходимо ступенчатое изменение скорости (например, лифты) используют многоскоростные асинхронные двигатели. В механизмах, требующих остановки за определенное время и фиксации вала при исчезновении напряжения питания, применяются асинхронные двигатели с электромагнитным тормозом (металлообрабатывающие станки, лебедки). Существуют также асинхронные двигатели с повышенным скольжением, которые предназначены для работы в повторно-кратковременных режимах, а также режимах с пульсирующей нагрузкой.
После того, как определен тип электродвигателя, полностью учитывающий специфику рабочего механизма и условия работы, необходимо определиться с рабочими параметрами двигателя: мощностью, номинальным и пусковым моментами, номинальными напряжением и током, режимом работы, коэффициентом мощности, классом энергоэффективности.
Мощность и моменты
В общем случае для квалифицированного подбора электродвигателя должна быть известна нагрузочная диаграмма механизма. Однако, в случае постоянной или слабо меняющейся нагрузки без регулирования скорости достаточно рассчитать требуемую мощность по теоретическим или эмпирическим формулам, зная рабочие параметры нагрузки. Ниже приведены формулы для расчета мощности двигателя P2 [кВт] некоторых механизмов.
- Вентилятор
где Q [м3/с] – производительность вентилятора,
Н [Па] – давление на выходе вентилятора,
ηвент, ηпер – КПД вентилятора и передаточного механизма соответственно,
kз – коэффициент запаса.
- Насос
где Q [м3/с] – производительность насоса,
g=9,8 м/с2 – ускорение свободного падения,
H [м] – расчетная высота подъема,
ρ [кг/м3] – плотность перекачиваемой жидкости,
ηнас, ηпер – КПД насоса и передаточного механизма соответственно,
kз – коэффициент запаса.
- Поршневой компрессор
где Q [м3/с] – производительность компрессора,
А [Дж/м3] – работа изотермического и адиабатического сжатия атмосферного воздуха объемом 1 м3 давлением 1,1·105 Па до требуемого давления,
ηкомпр, ηпер – КПД компрессора и передаточного механизма соответственно,
kз – коэффициент запаса.
Кроме того, необходимо сопоставить пусковой момент двигателя (особенно в случае асинхронного с короткозамкнутым ротором) и рабочего механизма, так как некоторые механизмы имеют повышенное сопротивление в момент трогания. Следует иметь в виду и то обстоятельство, что при замене трехфазного асинхронного двигателя на однофазный пусковой момент последнего почти в три раза меньше и механизм, успешно функционировавший ранее, может не тронуться с места.
Развиваемый электродвигателем момент M [Нм] и полезная мощность на валу Р2 [кВт] связаны следующим соотношением
Полная мощность, потребляемая из сети:
для двигателей постоянного тока (она же активная)
для двигателей переменного тока
при этом потребляемые активная и реактивная мощности соответственно
В случае синхронного двигателя значение Q1 может получиться отрицательным, это означает, что двигатель отдает реактивную мощность в сеть.
Важно отметить следующее. Не следует выбирать двигатель с большим запасом по мощности, так как это приведет к снижению его КПД, а в случае двигателя переменного тока также к снижению коэффициента мощности.
Напряжение и ток
При выборе напряжения электродвигателя необходимо учитывать возможности системы энергоснабжения предприятия. При этом нецелесообразно при больших мощностях выбирать двигатель с низким напряжением, так как это приведет к неоправданному удорожанию не только двигателя, но и питающих проводов и коммутационной аппаратуры вследствие увеличения расхода меди.
Если при трогании момент сопротивления нагрузки невелик и для уменьшения пусковых токов асинхронного двигателя с короткозамкнутым ротором может быть применен способ пуска с переключением со «звезды» на «треугольник», необходимо предусмотреть вывод в клеммную коробку всех шести зажимов обмотки статора. В общем случае применение схемы соединения «звезда» является предпочтительным, так как в схеме «треугольник» имеется контур для протекания токов нулевой последовательности, которые приводят к нагреву обмотки и снижению КПД двигателя, в соединении «звезда» такой контур отсутствует.
Режим работы
Нагрузка электродвигателя в процессе работы может изменяться различным образом. ГОСТом предусмотрены восемь режимов работы.
- Продолжительный S1 – режим работы при постоянной нагрузке в течение времени, за которое температура двигателя достигает установившегося значения. Мощность двигателя, работающего в данном режиме, рассчитывается исходя из потребляемой механизмом мощности. Формулы расчета мощности некоторых механизмов (насос, вентилятор, компрессор) приведены выше.
- Кратковременный S2 – режим, при котором за время включения на постоянную нагрузку температура двигателя не успевает достичь установившегося значения, а за время отключения двигатель охлаждается до температуры окружающей среды. В случае использования двигателя S1 для работы в режиме S2 необходимо проверить его только по перегрузочной способности, так как температура не успевает достичь допустимого значения.
- Повторно-кратковременный S3 – режим с периодическим отключением двигателя, при котором за время включения температура не успевает достичь установившегося значения, а за время отключения – температуры окружающей среды. Расчет мощности электродвигателя обычного исполнения для работы в режиме S3 производится по методам эквивалентных величин с учетом пауз и потерь в переходных режимах. Кроме того, двигатель необходимо проверить на допустимое число включений в час. В случае большого числа включений в час рекомендуется использовать двигатели с повышенным скольжением. Данные электродвигатели обладают повышенным сопротивлением обмотки ротора, а, следовательно, меньшими пусковыми и тормозными потерями.
- Повторно-кратковременный с частыми пусками S4 и повторно-кратковременный с частыми пусками и электрическим торможением S5. Данные режимы рассматриваются аналогично режиму S3.
- Перемежающийся S6 – режим, при котором работа двигателя под нагрузкой, периодически заменяется работой на холостом ходу. Большинство двигателей, работающих в продолжительном режиме, имеют меняющийся график нагрузки.
При этом для обоснованного выбора двигателя с целью оптимального его использования рекомендуется применять методы эквивалентных величин.
Класс энергоэффективности
В настоящее время вопросам энергоэффективности уделяется огромное внимание. При этом под энергоэффективностью понимается рациональное использование энергетических ресурсов, с помощью которого достигается уменьшение потребления энергии при том же уровне мощности нагрузки. Основным показателем энергоэффективности двигателя является его коэффициент полезного действия
где Р2 – полезная мощность на валу, Р1 – потребляемая активная мощность из сети.
Стандартом IEC 60034-30 для асинхронных электродвигателей с короткозамкнутым ротором были установлены три класса энергоэффективности: IE1, IE2, IE3.
Рис. 1. Классы энергоэффективности
Так, например, использование двигателя мощностью 55 кВт повышенного класса энергоэффективности позволяет сэкономить около 8000 кВт в год от одного двигателя.
Степень защиты IP, виды климатических условий и категорий размещения
ГОСТ Р МЭК 60034-5 – 2007 устанавливает классификацию степеней защиты, обеспечиваемых оболочками машин.
Обозначение степени защиты состоит из букв латинского алфавита IP и последующих двух цифр (например, IP55).
Большинство электродвигателей, выпускаемых в настоящее время, имеют степени защиты IP54 и IP55.
Категория размещения обозначается цифрой:
1 – на открытом воздухе;
2 – под навесом при отсутствии прямого солнечного воздействия и атмосферных осадков;
3 – в закрытых помещениях без искусственного регулирования климатических условий;
4 – в закрытых помещениях с искусственно регулируемыми климатическими условиями.
Климатические условия:
У – умеренный климат;
УХЛ – умеренно холодный климат;
ХЛ – холодный климат;
Т – тропический климат.
Таким образом, при выборе электродвигателя необходимо учитывать условия окружающей среды (температура, влажность), а также необходимость защиты двигателя от воздействия инородных предметов и воды.
Например, использование электродвигателя с типом климатического исполнения и категорией размещения У3 на открытом воздухе является недопустимым.
Усилия, действующие на вал двигателя со стороны нагрузки
Наиболее нагруженными в двигателе являются подшипниковые узлы. Поэтому при выборе двигателя должны быть учтены радиальные и осевые усилия, действующие на рабочий конец вала двигателя со стороны нагрузки. Превышения допустимых значений сил приводит к ускоренному выходу из строя не только подшипников, но и всего двигателя (например, задевание ротора о статор).
Обычно допустимые значения сил для каждого подшипника приведены в каталогах. Рекомендуется в случае повышенных радиальных усилий (ременная передача) на рабочий конец вала установить роликовый подшипник, при этом предпочтительным является двигатель с чугунными подшипниковыми щитами.
Особенности конструкции двигателя при работе от преобразователя частоты
В настоящее время все большее распространение приобретает использование частотно-регулируемого привода (ЧРП), выполненного на основе асинхронного электродвигателя с короткозамкнутым ротором.
При использовании частотно-регулируемого привода достигается:
1. экономия электроэнергии;
2. плавность пуска и снижение пусковых токов;
3. увеличение срока службы двигателя.
В общем случае стандартный электродвигатель нельзя использовать в составе частотно-регулируемого привода, так как при уменьшении скорости вращения снижается эффективность охлаждения. При регулировании скорости вверх от номинальной резко увеличивается нагрузка от собственного вентилятора. В обоих случаях уменьшается нагрузочная способность двигателя. Кроме того, в случае использования двигателя в системах точного регулирования необходим датчик положения ротора двигателя.
При работе электродвигателя от преобразователя частоты в контуре вал – фундаментная плита могут протекать токи. При этом возникает точечная эрозия на шариках и роликах, на беговых кольцах подшипников качения, а также на баббитовой поверхности подшипников скольжения. От электролиза смазка чернеет, подшипники греются. Для разрыва контура прохождения подшипниковых токов на неприводной конец вала устанавливается изолированный подшипник. При этом по условиям безопасности установка изолированных подшипников с двух сторон двигателя не допустима.
Величина подшипниковых токов становится опасной для безаварийной работы двигателя при напряжении между противоположными концами вала более 0,5 В. Поэтому установка изолированного подшипника обычно требуется для электродвигателей с высотой оси вращения более 280 мм.
Примечание
Необходимо отметить, что в случае отклонения условий эксплуатации двигателя (например, температуры окружающей среды или высоты над уровнем моря), мощность нагрузки должна быть изменена. Кроме того, при снижении мощности нагрузки в определенные моменты времени для рационального использования двигателя может быть изменена схема соединения обмотки, а, следовательно, и фазное напряжение.
По теме
Преобразователи частоты INSTART
Дополнительное оборудование к ПЧ: тормозные резисторы и модули, дроссели, фильтры
Устройства плавного пуска INSTART
Популярные товары
Шины медные гибкие изолированные ШМГИ
Шины медные плетеные ШМП
Компенсаторы шинные медные
Изоляторы опорные и проходные
en-res.ru
Какой электродвигатель лучше выбрать?
При выборе бесщеточного электродвигателя для своих разработок инженеры имеют несколько вариантов. Неправильный выбор может привести к провалу проекта не только на этапе разработки – испытания, но и после выхода на рынок, что крайне не желательно. Для облегчения работы инженеров мы сделаем краткое описание преимуществ и недостатков четырех наиболее популярных видов бесщеточных электрических машин: асинхронный электродвигатель (АД), двигатель с постоянными магнитами (ПМ), синхронные реактивные электродвигатели (СРД), вентильные реактивные электродвигатели (ВРД).
Содержание:Асинхронные электродвигатели
Асинхронные электрические машины смело можно назвать костяком современной промышленности. Благодаря своей простоте, относительно низкой стоимости, минимальным затратам на обслуживание, а также возможности работать напрямую от промышленных сетей переменного тока, они прочно въелись в современные производственные процессы.
Сегодня существует множество различных преобразователей частоты с самыми различными алгоритмами управления, которые позволяют регулировать скорость и момент асинхронной машины в большом диапазоне с хорошей точностью. Все эти свойства позволили асинхронной машине значительно потеснить с рынка традиционные коллекторные двигатели. Вот почему регулируемые асинхронные электродвигатели (АД) легко встретить в самых различных устройствах и механизмах, таких как тяговый асинхронный электропривод, электроприводы стиральных машин, вентиляторов, компрессоров, воздуходувок, кранов, лифтов и многом другом электрооборудовании.
АД создает вращающий момент за счет взаимодействия тока статора с индуцированным током ротора. Но токи ротора нагревают его, что приводит к нагреванию подшипников и снижению их срока службы. Замена традиционной алюминиевой обмотки на медную не устраняет проблему, а приводит к удорожанию электрической машины и может накладывать ограничения на прямой ее пуск.
Статор асинхронной машины имеет довольно большую постоянную времени, что негативно сказывается на реагировании системы управления при изменении скорости или нагрузки. К сожалению, потери связанные с намагничиванием не зависят от нагрузки машины, что снижает КПД АД при работе с малыми нагрузками. Автоматическое уменьшение потока статора возможно использовать для решения данной проблемы — для этого необходим быстрый отклик системы управления на изменения нагрузки, но как показывает практика, такая коррекция не существенно увеличивает КПД.
На скоростях превышающих номинальную поле статора ослабевает из-за ограниченного напряжения питания. Вращающий момент начинает падать, так как для его поддержания будет требоваться больший ток ротора. Следовательно, управляемые АД ограничиваются диапазоном скорости для поддержания постоянной мощности примерно 2:1.
Механизмы, которые требуют более широкого диапазона регулирования, такие как: станки с ЧПУ, тяговый электропривод, могут снабжаться асинхронными электродвигателями специального исполнения, где для увеличения диапазона регулирования могут уменьшать количество витков обмотки, снижая при этом значения крутящего момента на низких скоростях. Также возможен вариант с использованием более высоких токов статора, что требует установки более дорогих и менее эффективных инверторов.
Немаловажным фактором при работе АД является качество питающего напряжения, ведь максимальный КПД электродвигатель имеет при синусоидальной форме питающего напряжения. В реальности преобразователь частоты обеспечивает импульсное напряжение и ток, похожий на синусоидальный. Проектировщикам стоит иметь ввиду, что КПД системы ПЧ-АД будет меньше, чем сумма КПД преобразователя и двигателя в отдельности. Улучшения качества выходного тока и напряжения повышают увеличением несущей частоты преобразователя, это приводит к снижению потерь в двигателе, но при этом возрастают потери в самом инверторе. Одним из популярных решений, особенно для промышленных мощных электроприводов, является установка фильтров между преобразователем частоты и асинхронной машиной. Однако это приводит к увеличению стоимости, габаритов установки, а также к дополнительным потерям мощности.
Еще одним недостатком асинхронных машин переменного тока является то, что их обмотки распределены на протяжении многих пазов в сердечнике статора. Это приводит к появлению длинных концевых поворотов, которые увеличивают габариты и потери энергии в машине. Эти вопросы исключены в стандартах IE4 или классах IE4. В настоящее время европейский стандарт (IEC60034) специально исключает любые двигатели, требующие электронного управления.
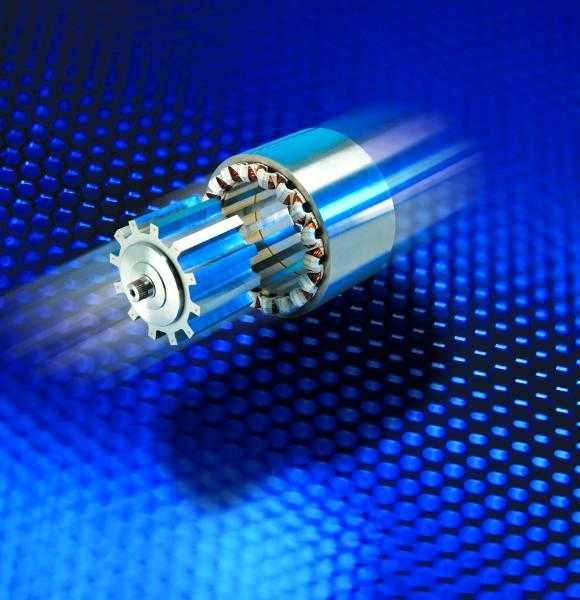
Двигатели с постоянными магнитами
Двигатели с постоянными магнитами (английский PMMS) создают крутящий момент благодаря взаимодействию токов статора с постоянными магнитами внутри или снаружи ротора. Электродвигатели с поверхностным расположением магнитов являются маломощными и используются в IT оборудовании, офисной технике, автомобильном транспорте. Электродвигатели со встроенными магнитами (IPM) распространены в мощных машинах, используемых в промышленности.
Двигатели с постоянными магнитами (ПМ) могут использовать концентрированные (с коротким шагом) обмотки, если пульсации вращающего момента не являются критичными, но распределенные обмотки являются нормой в ПМ.
Поскольку PMMS не имеют механических коммутаторов, то преобразователи играют важную роль в процессе контроля тока обмотки.
В отличии от других видов бесщеточных электродвигателей, PMMS не требуют тока возбуждения, необходимого для поддерживания магнитного потока ротора. Следовательно, они способны обеспечить максимальный крутящий момент на единицу объема и могут быть лучшим выбором, если требования к массо-габаритным показателям выходят на первый план.

К наибольшим недостаткам таких машин можно отнести их очень высокую стоимость. Высокопроизводительные электрические машины с постоянными магнитами используют такие материалы как неодим и диспрозий. Данные материалы относятся к редкоземельным и добываются в геополитически нестабильных странах, что приводит к высоким и нестабильным ценам.
Также постоянные магниты добавляют производительности при работе на низких скоростях, но являются «Ахиллесовой пятой» при работе на высоких. Например, при увеличении скорости машины с постоянными магнитами возрастет и ее ЭДС, постепенно приближаясь к напряжению питания инвертора, при этом снизить поток машины не представляется возможным. Как правило, номинальная скорость является максимальной для ПМ с поверхностно-магнитной конструкцией при номинальном напряжении питания.
На скоростях больше номинальной, для электродвигателей с постоянными магнитами типа IPM, используют подавление активного поля, что достигается путем манипуляций с током статора при помощи преобразователя. Диапазон скорости, в котором двигатель может надежно работать, ограничен примерно 4:1.
Необходимость ослабления поля в зависимости от скорости приводит к потерям независящим от вращающего момента. Это снижает КПД на высоких скоростях, и особенно при малых нагрузках. Этот эффект наиболее актуален при использовании ПМ в качестве тягового автомобильного электропривода, где высокая скорость на автостраде неизбежно влечет за собой необходимость ослабления магнитного поля. Часто разработчики выступают за применение двигателей с постоянными магнитами в качестве тяговых электроприводов электромобилей, однако их эффективность при работе в данной системе довольно сомнительна, особенно после вычислений связанных с реальными циклами вождения. Некоторые производители электромобилей сделали переход от ПМ к асинхронным электродвигателям в качестве тяговых.
Также к существенным недостаткам электродвигателей с постоянными магнитами можно отнести их трудно управляемость в условиях неисправности из-за присущей им противо-ЭДС. Ток будет протекать в обмотках, даже при выключенном преобразователе, пока вращается машина. Это может приводить к перегреву и другим неприятным последствиям. Потеря контроля над ослабленным магнитным полем, например при аварийном отключении источника питания, может привести к неподконтрольной генерации электрической энергии и, как следствие, к опасному возрастанию напряжения.
Рабочие температуры – это еще одна не самая сильная сторона ПМ, кроме машин, изготовленных из самарий-кобальта. Также большие броски тока инвертора могут привести к размагничиванию.
Максимальная скорость PMMS ограничивается механической прочностью крепления магнитов. В случае повреждения ПМ его ремонт, как правило, осуществляется на заводе изготовителе, так как извлечение и безопасная обработка ротора практически невозможна в обычных условиях. И, наконец, утилизация. Да это тоже доставляет немного хлопот после окончания срока службы машины, но наличие редкоземельных материалов в этой машине должно упростить этот процесс в ближайшем будущем.
Несмотря на перечисленные выше недостатки, электродвигатели с постоянными магнитами являются непревзойденными с точки зрения низкоскоростных мелкогабаритных механизмов и устройств.
Реактивные синхронные двигатели
Синхронные реактивные электродвигатели всегда работают только в паре с преобразователем частоты и используют тот же тип управления потоком статора, что и обычный АД. Роторы данных машин изготавливают из тонколистной электротехнической стали с пробитыми пазами таким образом, что бы они намагничивались с одной стороны меньше, чем с другой. Стремление магнитного поля ротора «соединится» с вращающимся магнитным потоком статора и создает вращающий момент.
Основным плюсом реактивных синхронных электродвигателей являются незначительные потери в роторе. Таким образом, хорошо спроектированная и работающая с правильно подобранным алгоритмом управления синхронная реактивная машина вполне способна соответствовать европейским стандартам премиум класса IE4 и NEMA, не используя при этом постоянных магнитов. Снижения тепловых потерь в роторе повышает крутящий момент и увеличивает плотность мощности, по сравнению с асинхронными машинами. Эти двигатели имеют низкий уровень шума благодаря низкому уровню пульсаций момента и вибраций.
Основным недостатком является низкий коэффициент мощности по сравнению с асинхронной машиной, что приводит к большей потребляемой мощности из сети. Это увеличивает затраты и ставит перед инженером сложную задачу, стоит ли применять реактивную машину или нет для конкретной системы?
Сложность в изготовлении ротора и его хрупкость делает невозможным применение реактивных электродвигателей для высокоскоростных операций.
Синхронные реактивные машины хорошо подходят для широкого спектра промышленных применений, которые не требуют больших перегрузок или высоких скоростей вращения, а также все чаще применяются для частотно-регулируемых насосов из-за повышенной их эффективности.
Вентильные реактивные электродвигатели
Вентильный реактивный двигатель (с английского SRM) создает вращающий момент за счет притягивания магнитных полей зубцов ротора к магнитному полю статора. Вентильные реактивные двигатели (ВРД) имеют относительно небольшое количество полюсов обмотки статора. Ротор имеет зубчатый профиль, что упрощает его конструкцию и улучшает создаваемое магнитное поле, в отличии от реактивных синхронных машин. В отличии от синхронных реактивных двигателей (СРД), ВРД используют импульсное возбуждение постоянного тока, что требует обязательное наличие специального преобразователя для их работы.
Для поддержания магнитного поля в ВРД необходимы токи возбуждения, что уменьшает плотность мощности по сравнению с электрическими машинами с постоянными магнитами (ПМ). Однако они все же имеют габаритные размеры меньшие, чем обычные АД.
Основным преимуществом вентильных реактивных машин является то, что ослабления магнитного поля происходит естественным образом при снижении тока возбуждения. Это свойство дает им большое преимущество в диапазоне регулирования при скоростях выше номинальной (диапазон устойчивой работы может достигать 10:1). Высокая эффективность присутствует у таких машин при работе на высоких скоростях и с малыми нагрузками. Также ВРД способны обеспечить удивительно постоянную эффективность в довольно широком диапазоне регулирования.
Вентильные реактивные машины обладают также довольно хорошей отказоустойчивостью. Без постоянных магнитов эти машины не генерируют неуправляемый ток и момент при неисправностях, а независимость фаз ВРД позволяет им работать с уменьшенной нагрузкой, но с повышенными пульсациями момента при выходе из строя какой-то из фаз. Это свойство может быть полезно, если проектировщики хотят повышенной надежности разрабатываемой системы.
Простая конструкция ВРД делает его прочным и недорогим в изготовлении. При его сборке не используются дорогие материалы, а ротор из нелегированной стали отлично подходит для суровых климатических условий и высоких скоростей вращения.
ВРД имеет коэффициент мощности меньший, чем ПМ или АД, но его преобразователю не нужно создавать выходное напряжение синусоидальной формы для эффективной работы машины, соответственно такие инверторы имеют меньшие частоты коммутации. Как следствие – меньшие потери в инверторе.
Основными недостатками вентильных реактивных машин являются наличие акустических шумов и вибрации. Но с этими недостатками довольно хорошо борются путем более тщательного проектирования механической части машины, улучшения электронного управления, а также механическое объединение двигатель – рабочий орган.
ВРД хорошо подходят для широкого спектра применения и их все чаще используют для обработки сверхпрочных материалов из-за большой перегрузочной способности и большого диапазона регулирования скоростей. Большая перегрузочная способность делает их все более привлекательными для использования в качестве тяговых электроприводов современных электромобилей. Также ВРД получили широкое распространение и в электробытовой технике.
elenergi.ru
Как рассчитать мощность электродвигателя? Формулы, эффективные методики + инструкция с фото и видео
Электродвигатель — незаменимое устройство, обеспечивающее функционирование всевозможных машин, конструкций и механизмов. Именно с его помощью происходит превращение энергии электрической в полезную энергию кинетическую. Электродвижок используется для поддержания работы различных насосных систем, машин, технических средств, вентиляционного оборудования, установок и других агрегатов.

Вследствие широкого спектра применения этого типа устройств, зачастую возникает вопрос, как правильно определить мощность электродвигателя. Это очень важный нюанс, поэтому для определения данного показателя разработано несколько методов, которые позволят произвести расчет ориентируясь на особенности и условия эксплуатации двигателя.

Краткое содержимое статьи:
Типы электродвигателей
Для начала желательно разобраться, какими же бывают модификации и модели движков. Именно от типа двигателя зависит величина мощности, которой он обладает, и другие показатели, характеризующие устройство.

Согласно общей классификации, электродвигатели бывают:
- постоянного тока;
- переменного тока.
Первый вид встречается редко, так как для его использования необходим источник постоянного электрического тока. Второй вариант применяется намного чаще, двигатель переменного тока востребован для обеспечения функционирования большей части современного оборудования.

Электродвижки переменного тока разделяются на синхронные и асинхронные. От модели двигателя во многом зависят основные технические характеристики устройства, например, показатель мощности у различных модификаций может варьировать от минимальных значений до 10 000 кВатт.

Выбор той или иной модели электродвигателя должен осуществляться исходя из оптимальных значений показателей для каждого конкретного случая.

Понятие мощности
Так для чего необходимо знать мощность двигателя? Что это за показатель, и почему на него нужно обращать внимание при выборе?

Электрическая мощность – показатель, характеризующий, насколько быстро передается или преобразуется кинетическая энергия. Представляет собой произведение напряжения сети на силу тока проводника. Единицей измерения считается 1 ватт.

Чтобы рассчитать показатель, в случае, когда по шильдикам (специальное изображение на двигателе, содержащее в себе данные обо всех основных характеристиках устройства) можно получить информацию лишь о номинальной максимальной мощности, необходимо:
- найти данные о коэффициенте полезного действия двигателя (КПД) и коэффициенте его мощности;
- принять к сведению взаимодействие динамических характеристик вала электродвигателя и КПД.
Обладая этими сведениями, можно с легкостью посчитать затраченную мощность, которая будет равна отношению номинальной мощности к КПД.

Обратите внимание, что энергия, которая потребляется электроприборами, включает в себя два основных типа мощностей двигателя: активную и реактивную. Активная компонента расходуется на полезную работу и образование тепла. Реактивная мощность говорит о способности деталей электродвигателя сохранять получаемую энергию.

Чтобы осуществить расчет, необходим достаточно большой набор инструментов: электрическая сеть, выступающая источником тока, линейка или специальный прибор – штангенциркуль, амперметр (прибор, позволяющий определить силу тока), динамометр, табличка, содержащая сведения о зависимости константы от числа полюсов, тахометр.

Варианты расчета показателя
Существует несколько способов и формул расчета мощности электродвигателя. Приготовив все необходимые инструменты, можно переходить к определению значения показателя одним из следующих методов:
По току электросети. Для этого электродвижок включается в сеть с фиксированным напряжением. Поочередно включая в каждую из обивок прибор амперметр, необходимо измерить работающий ток электродвигателя в единицах измерения – Амперах. Считаем, какое количество замеров было произведено, определяем сумму показателей, находим среднее значение. Полученное число перемножаем со значением напряжения в электросети, результат – мощность движка, выраженная в Ваттах.
По размерам. Для этого метода необходимо измерить длину и диаметр определенной детали – сердечника статора электродвижка и найти сведения о частоте оборачиваемости вала.

После получения сведений осуществляется приблизительный расчет по следующей формуле: Число Пи(3,14)*D*n/(120*f). На основании произведенного расчета, и найдя в справочнике постоянное число (константу), определяем мощность: P=C*D^2*I*n*10^(-6).

По тяговой силе. Для этого, с помощью тахометра необходимо измерить скорость вращения вала, его радиус (это проделывается штангенциркулем или линейкой), а также тяговое усилие электродвижка динамометром. Все полученные значения необходимо подставить в следующую формулу: P=M*w=F*2*3,14*n*r.

Для того, чтобы правильно рассчитать величину показателя тем или иным способом, можно изучить подробную инструкцию на видео или фото определения мощности электродвигателя различными методами. Это поможет вам не запутаться в осуществляемых действиях, сделать все четко и безошибочно.

Таким образом, помните, что мощность электродвигателя является основным показателем его работы, именно от неё зависит область применения устройства и выполняемые им задачи. Поэтому к расчету данного показателя необходимо подойти очень внимательно, осознавая серьезность осуществляемых действий.

Фото способов определения мощности электродвигателя





































electrikmaster.ru
Выбор электродвигателя по мощности при различных режимах работы
Общие положения
От правильного выбора электродвигателя по мощности зависит работа электропривода и его энергетические показатели в процессе эксплуатации. В тех случаях, когда нагрузка электродвигателя существенно меньше номинальной, он недоиспользуется по мощности, что приводит к излишним капитальным вложениям, заметному снижению коэффициента мощности и кпд. Если же нагрузка на валу электродвигателя превышает номинальную, возрастают токи в его обмотках, вследствие чего температура электродвигателя может превысить допустимую величину. Это, прежде всего, приводит к снижению электрической прочности электроизоляционных материалов, что связано с опасностью пробоя изоляции обмоток и выходом электродвигателя из строя. В этом случае одним из критериев выбора электродвигателя по мощности является температура его обмоток.
Задача выбора электродвигателя по мощности осложняется еще и тем обстоятельством, что нагрузка на его валу в процессе работы изменяется во времени, а соответственно изменяется температура обмоток. Если при этих условиях выбрать электродвигатель таким образом, чтобы его номинальная мощность была равна наибольшей мощности нагрузки, то в периоды ее снижения он будет недоиспользован по мощности, а значит, начнут проявляться все отрицательные явления, указанные выше.
Выбор электродвигателя с номинальной мощностью равной минимальной мощности нагрузки вообще недопустим по условиям перегрузочной способности и температурному режиму.
Поэтому обоснованное решение вопроса выбора электродвигателя может быть принято только на базе диаграмм зависимости изменения нагрузок во времени, что дает возможность оценить его температуру при известном характере процесса его нагрева. Это обеспечит надежную работу электропривода в течение всего срока его эксплуатации и является первым обязательным условием правильного выбора электродвигателя с учетом режима работы механизма.
Второе обязательное условие правильного выбора электродвигателя заключается в том, что его перегрузочная способность должна быть достаточной для устойчивой работы его в периоды максимальной нагрузки.
Третьим условием правильного выбора электродвигателя является обеспечение нормального процесса его пуска.
Номинальные режимы работы электродвигателей
Режимом работы называется установленный порядок чередования, продолжительности и величины нагрузки, холостого хода, торможения, пуска и реверса машины во время работы.
Номинальным режимом работы электродвигателя называется режим, для работы в котором электрическая машина предназначена заводом изготовителем. Это один из параметров его технической характеристики, приведенной в паспорте или каталоге. Именно для этого режима в каталогах и паспорте электродвигателя указываются номинальная полезная механическая мощность на валу, номинальное напряжение, номинальный ток, номинальная частота вращения, номинальный кпд, номинальный коэффициент мощности, номинальный режим работы.
Номинальные данные характеризуют работу электрической машины, установленной на высоте до 1000 м над уровнем моря, при температуре окружающей среды 40С и охлаждающей воды 30С1.
В соответствии с ГОСТ 183-74 (СТ СЭВ 1346-78) установлено восемь номинальных режимов работы электрических машин, которые в соответствии с международной классификацией имеют условные обозначения S1 – S8.
Режимом продолжительной нагрузки S1 (продолжительным режимом) называется режим, при котором время работы электрической машины при практически неизменных нагрузке и температуре охлаждающей среды достаточно для нагрева всех ее частей до практически установившейся температуры, рис. 3.1а. Режим характеризуется неизменными тепловыми потерями в течение всего времени работы.
Режимом кратковременной нагрузки S2 (кратковременным режимом) называют режим, при котором периоды работы с неизменной нагрузкой чередуются с периодами отключения электрической машины (паузами), рис. 3.1б, причем за время работы температура его частей не успевает достигнуть установившегося значения, а за время пауз (отключения) она охлаждается до установившейся температуры, отличающейся от температуры окружающей среды не более чем на 1С. Установленная ГОСТ длительность периодов работы в данном режиме 10, 30, 60 и 90 мин. Она должна быть указана в условном обозначении режима работы, например S2-60 мин.
Режим повторно-кратковременной нагрузки (повторно-кратковременный) имеет три разновидности S3, S4, S5. Он отличается от кратковременного регламентированными продолжительностью включения под неизменную нагрузку и продолжительностью периодов отключения (пауз). Время работы электрической машины всегда меньше времени, необходимого для нагрева ее частей до установившейся температуры, а время пауз меньше необходимого для остывания машины до практически холодного состояния. Продолжительность цикла 10 мин.(600 с.), если нет других указаний.
Режим повторно-кратковременной нагрузки S3 – последовательность идентичных рабочих циклов, каждый из которых состоит из периодов работы при постоянной нагрузке и отключенного неподвижного состояния, рис. 3.1в. Так как продолжительность пускового периода намного меньше периода работы под нагрузкой предполагается отсутствие влияния на нагрев электрической машины пускового тока и увеличения мощности тепловых потерь за время пуска. Для режима S3 характеризующим является только один параметр - продолжительность включения:
|
| (3.1) |
где  – период работы при номинальных условиях, с.;
– период работы при номинальных условиях, с.;
 –период отключенного, неподвижного состояния, с.;
–период отключенного, неподвижного состояния, с.;
 –продолжительность цикла, с.
–продолжительность цикла, с.
Для всех разновидностей S3, S4, S5 повторно-кратковременного режима номинальная продолжительность включения принята 15, 25, 40, 60%.
В условном обозначении режима S3 указывается продолжительность включения в %, например S3-40%.
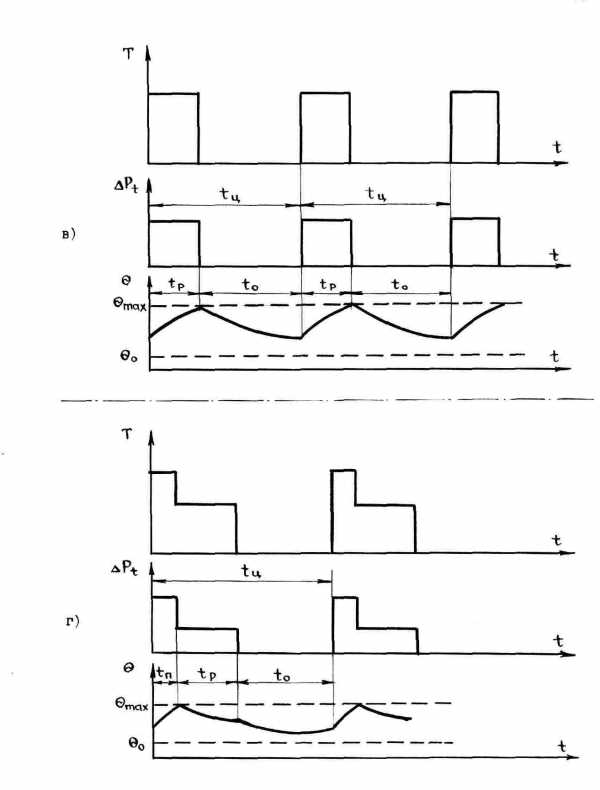
Режим повторно-кратковременной нагрузки, включая пуск, S4 – последовательность идентичных рабочих циклов, каждый из которых состоит из периодов пуска, работы при постоянной нагрузке и отключенного неподвижного состояния (пауз) рис.3.1г. Время пуска соизмеримо со временем работы под нагрузкой, а поэтому пусковой ток и увеличение мощности тепловых потерь в пусковой период оказывают непосредственное влияние на нагрев электрической машины (электродвигателя).
Для режима S4 характеризующими параметрами являются:
продолжительность включения
|
| (3.2) |
число включений, циклов в час
|
| (3.3) |
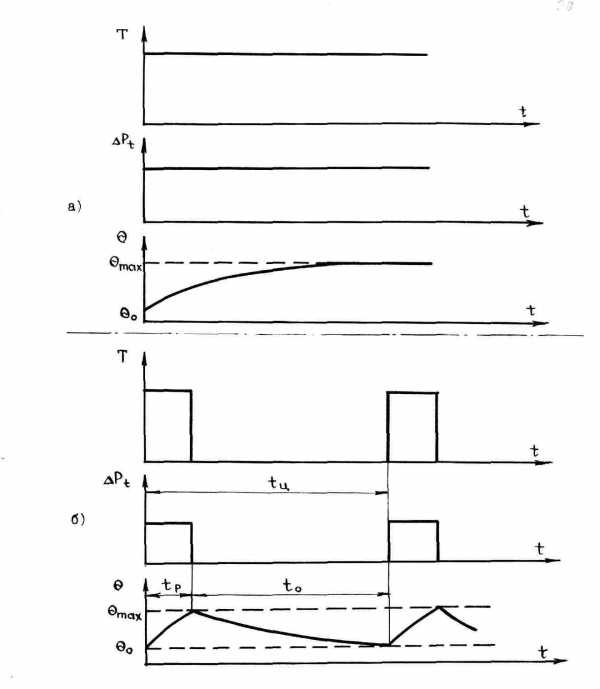
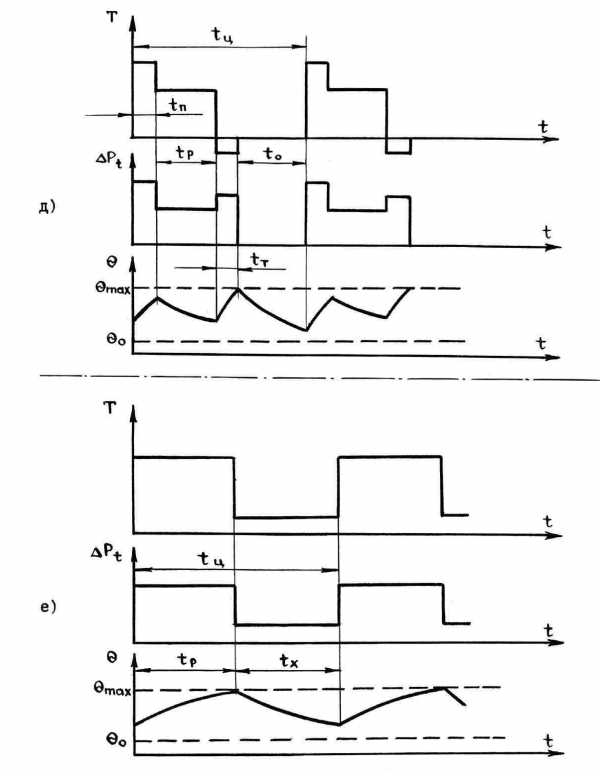
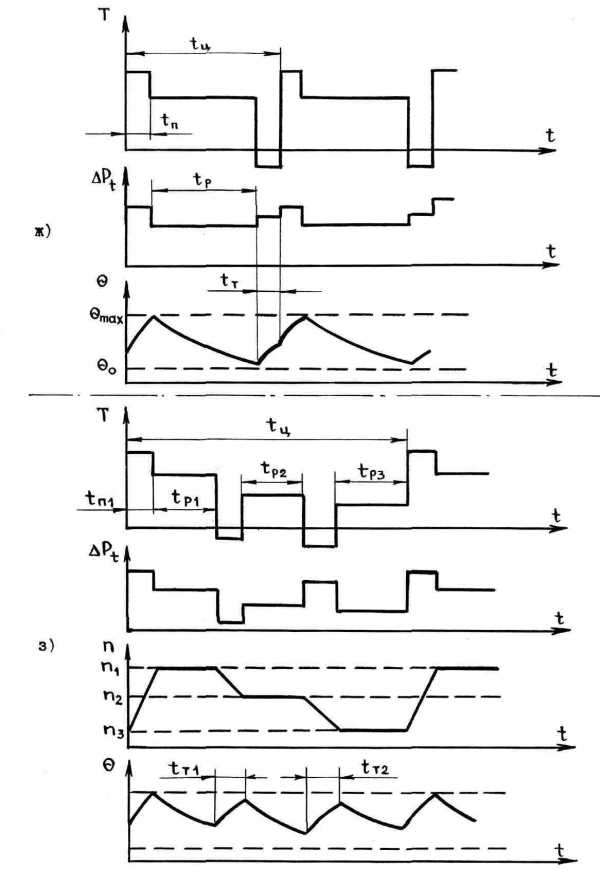
а – S1, б – S2, b – S3, г – S4, д – S5, е – S6, ж – S7, з – S8
tп - время пуска; tр - время работы при номинальных условиях;
t т - время торможения; tx - время холостого хода; t 0 - время паузы;
tц - время цикла.
Рисунок 3.1 – Диаграмма полезного механического момента на валу двигателя Т, мощности тепловых потерь Рt , температуры электродвигателя при различных номинальных режимах работы
а – S1, б – S2, b – S3, г – S4, д – S5, е – S6, ж – S7, з – S8
tп - время пуска; tр - время работы при номинальных условиях;
t т - время торможения; tx - время холостого хода; t 0 - время паузы;
tц - время цикла.
Рисунок 3.1 – Диаграмма полезного механического момента на валу двигателя Т, мощности тепловых потерь DРt , температуры электродвигателя Q при различных номинальных режимах работы
а – S1, б – S2, b – S3, г – S4, д – S5, е – S6, ж – S7, з – S8
tп - время пуска; tр - время работы при номинальных условиях;
t т - время торможения; tx - время холостого хода; t 0 - время паузы;
tц - время цикла.
Рисунок 3.1 – Диаграмма полезного механического момента на валу двигателя Т, мощности тепловых потерь DРt , температуры электродвигателя Q при различных номинальных режимах работы
а – S1, б – S2, b – S3, г – S4, д – S5, е – S6, ж – S7, з – S8
tп - время пуска; tр - время работы при номинальных условиях;
t т - время торможения; tx - время холостого хода; t 0 - время паузы;
tц - время цикла.
Рисунок 3.1 – Диаграмма полезного механического момента на валу двигателя Т, мощности тепловых потерь DРt , температуры электродвигателя Q при различных номинальных режимах работы
коэффициент инерции:
|
| (3.4) |
где tn – время пуска, с.;
 –момент инерции якоря (ротора) двигателя, кгм2;
–момент инерции якоря (ротора) двигателя, кгм2;
 –приведенный к валу электродвигателя момент инерции приводного механизма, кгм2;
–приведенный к валу электродвигателя момент инерции приводного механизма, кгм2;
 - число включений за один цикл.
- число включений за один цикл.
Номинальные значения:
 –30, 60, 120, 240;
–30, 60, 120, 240;
 –1.2, 1.6, 2, 2.5, 4, 6.3, 10.
–1.2, 1.6, 2, 2.5, 4, 6.3, 10.
В условном обозначении режима указывается  ,
, ,
, , напримерS4-25%, 120 вкл/час, FI - 2.0. Это означает, что электродвигатель при коэффициенте инерции
, напримерS4-25%, 120 вкл/час, FI - 2.0. Это означает, что электродвигатель при коэффициенте инерции  =2.0 рассчитан на работу при 120 включениях в час, длительность каждого цикла составляет 3600/120 = 30 с, из которых сумма времени пуска
=2.0 рассчитан на работу при 120 включениях в час, длительность каждого цикла составляет 3600/120 = 30 с, из которых сумма времени пуска и времени работы
и времени работы составляет 25% т.е. 7,5 с, а время пауз 22,5с.
составляет 25% т.е. 7,5 с, а время пауз 22,5с.
Режим повторно-кратковременной нагрузки, включая пуск и электрическое торможение, S5 – последовательность идентичных рабочих циклов, каждый из которых состоит из периодов пуска, работы при постоянной нагрузке, быстрого электрического торможения и отключенного, неподвижного состояния, рис. 3.1д. Длительность этих периодов недостаточна для достижения теплового равновесия за время одного цикла.
Для режима S5 продолжительность включения:
|
| (3.5) |
где  – время электрического торможения, с.
– время электрического торможения, с.
Остальные параметры аналогичны режиму S4. Иногда для режима S5 используют и такую характеристику как постоянная кинетической энергии – отношение кинетической энергии, запасенной ротором (якорем) электрической машины при номинальной частоте вращения (угловой скорости) к номинальной мощности электрической машины.
Условное обозначение режима аналогично S4, например S5 - 40%, 60 вкл/час, FI - 1.2.
Режимы S6, S7, S8 являются разновидностями продолжительного режима и носят название перемежающихся режимов.
Режим продолжительной работы при переменной нагрузке (перемежающийся режим) S6 – последовательность идентичных рабочих циклов, каждый из которых состоит из периодов работы при постоянной нагрузке и на холостом ходу, рис.3.1е. Влияние пусковых токов и мощности тепловых потерь на нагрев частей электродвигателя в пусковой период не учитывается.
Тепловое равновесие за время одного цикла не наступает. Продолжительность одного цикла, если нет других указаний, принимается 10 мин.(600с). Для режима S6 характеризующим параметром является продолжительность нагрузки (работы):
|
| (3.6) |
где tx – время (продолжительность) работы на холостом ходу, с.
Номинальные значения  – 15, 25, 40, 60%.
– 15, 25, 40, 60%.
В условном обозначении режима указывается  в %, напримерS6 - 15%.
в %, напримерS6 - 15%.
Режим продолжительной нагрузки, включая пуск и электрическое торможение (перемежающийся режим с частыми реверсами при электрическом торможении) S7 – последовательность идентичных циклов, каждый из которых состоит из периодов пуска, работы при постоянной нагрузке и электрического торможения, рис. 3.1 ж. Из-за малой длительности неизменной нагрузки потери в пусковые периоды, во время реверсов, электрическом торможении оказывают существенное влияние на нагрев частей двигателя. Длительность рабочего периода недостаточна для достижения теплового равновесия за время одного цикла.
Для этого режима характеризующими параметрами являются: число включений в час, коэффициент инерции, например S7 - 120 вкл/час,  -2.5.
-2.5.
Режим работы при периодическом изменении частоты вращения и нагрузки (перемежающийся режим с двумя и более частотами вращения) S8 – последовательность идентичных рабочих циклов, каждый из которых состоит из периодов ускорения, работы при постоянной нагрузке, соответствующей заданной частоте вращения, затем одного или нескольких периодов работы при других постоянных значениях нагрузки, соответствующим другим частотам вращения, рис. 3.1з. Изменение мощности тепловых потерь электродвигателя при переходе на другую частоту вращения с другой нагрузкой и при электрическом торможении оказывает существенное влияние на нагрев частей электродвигателя.
Для режима S8 характеризующими параметрами являются: число включений в час; коэффициент инерции; нагрузка, соответствующая каждой из частот вращения; частота вращения при соответствующей нагрузке, продолжительность нагрузки на каждой из частот вращения, рис. 3.1з:
Условное обозначение режима включает указанные выше характеристики, например S8 - 60 вкл/час;  - 2.0; 22 квт; 740 об/мин; 40%; 55квт; 1470 об/мин; 60%.
- 2.0; 22 квт; 740 об/мин; 40%; 55квт; 1470 об/мин; 60%.
Кроме основных номинальных режимов работы электрических машин (S1 – S8) в практике эксплуатации электродвигателей можно выделить: режим кратковременной нагрузки с продолжительностью цикла существенно меньшей 10 минут; режим чередующихся реверсов; режим стохастической нагрузки.
Режим кратковременной нагрузки с малой продолжительностью рабочего цикла является частным случаем режимов S2, S3 и отличается от них тем, что время работы в этом режиме соизмеримо со временем пуска электродвигателя. В связи с этим потери в электродвигателе необходимо рассматривать как функции времени, а не как постоянные величины.
Режим чередующихся реверсов относится к режиму S7, но отличается от него симметричным графиком мощности при различных направлениях вращения. Кроме того, рабочий цикл по времени соизмерим со временем реверса, и поэтому при расчете потерь необходимо учитывать апериодические составляющие тока и магнитного потока.
Режим стохастической (случайной) нагрузки характеризуется вероятностными характеристиками нагрузки на валу, а график случайной нагрузки не может быть выражен детерминированной функцией времени.
Еще раз обращаем внимание на то, что в каталогах, паспортах на электрические машины указываются номинальные режимы, и технические данные именно при этих номинальных режимах.
Так как рабочий режим реальных машин и механизмов, как правило, не совпадает с одним из рассмотренных номинальных, задача выбора электродвигателя по мощности для привода реальной машины, механизма заключается в том, чтобы правильно сопоставить ее рабочий режим с паспортным номинальным режимом электродвигателя, обеспечив максимальное использование выбранного электродвигателя по условиям нагрева.
studfiles.net








Карта сайта

г.Краснодар, ул.Симферопольская дом 5, офис 9
![]() 8 (989) 212 27 02
8 (989) 212 27 02 ![]() 8 (861) 260 24 40
8 (861) 260 24 40
