ул.Симферопольская
дом 5, офис 9
![]() Корзина
Корзина
Корзина пуста
Конспект занятия по теме Виды датчиков. Датчик звука назначение, способы крепежа. Датчики звука
Конспект занятия по теме Виды датчиков. Датчик звука назначение, способы крепежа
Тема: «Виды датчиков. Датчик звука назначение, способы крепежа»
Подлесных Елена Викторовна, МБОУ ДО Дом детского творчества, педагог дополнительного образования, учитель информатики и ИКТ МБОУ «СШ №17», ЯНАО, г. Новый Уренгой
Предмет (направленность): робототехника (научно-техническое творчество).
Возраст детей: 11 - 15 лет
Место проведения: класс.
Цели занятия:
Ввести понятие «датчик» (сенсор) Lego Mindstroms NXT, познакомить обучающихся с принципом работы датчика звука и способами его крепежа.
Задачи:
Образовательные: Сконструировать и запрограммировать базовую модель робота с использованием датчика звука.
Развивающие: развитие абстрактного и логического мышления, умения ориентироваться в пространстве, развитие мелкой моторики, развитие навыков работы с браузером и Google-формами
Воспитательные: Формировать навыки бережного отношения к собственным вещам и школьному имуществу
Форма занятия - групповая (практическая работа)
Оборудование:
компьютеры, проектор;
Лего-конструкторы Mindstroms NXT 2.0; ПК с установленной средой программирования ПервоРоботNXT 1.1.
План занятия:
Организационный момент
Изучение нового материала
Практическая работа №1: «Калибровка датчика звука. Восстановление заводских значений датчика»
Практическая работа №2: «Программирование робота»
Испытание робота
Рефлексия
Итоги занятия
Ход занятия:
Организационный момент
Изучение нового материала
Слайд №1.
Добрый день! Сегодня на занятии мы продолжим изучать принципы работы датчиков MINDSTORMS NXT. И датчик, о котором пойдет речь - это датчик звука.
Вопрос: Давайте вспомним, что же такое датчик (сенсор)?
Ответы обучающихся:
Датчик — средство измерений, предназначенное для выработки сигнала измерительной информации в форме, удобной для передачи, дальнейшего преобразования, обработки и (или) хранения, но не поддающейся непосредственному восприятию наблюдателем.
Вопрос: А как вы думаете, для чего нужен датчик звука?
Ответы обучающихся:
А давайте поближе познакомимся с этим сенсором!
Датчик звука (sound sensor) Слайд №2.
Датчик звука (или просто микрофон) измеряет уровень громкости звукового сигнала в (децибелах) dB и dBA.
Для справки, dBA - звуки дипазона 20-20000 Гц, воспринимаемые ухом человека, dB - весь дипазон, включая инфразвук и ультразвук.
Максимальное звуковое давление, которое может измерить датчик, - около 90 dB, что соответствуюет громкости газонокосилки. Показания датчика звука выражаются в процентах [%] от максимальной громкости, которую он способен зафиксировать.
Для сравнения уровень 4-5% соответствует фоновому шуму жилой комнаты, 5-10% - разговору на небольшом отдалении, 10-30% - разговору в непосредственной близости от микрофона. Наконец уровень 30-100% соответствует крику или громкой музыке. Измерения проводятся, когда микрофон находится на расстоянии 1 м от источника звука.
Режим просмотра (View)
Проверить датчик звука можно в режиме Просмотра. Подсоедините датчик ко входу 2 NXT.
Перейдите в режим Просмотра (View) и выберите иконку Sound dB. Выберите порт 2.
Издавайте звуки в микрофон и наблюдайте за показаниями датчика на экране дисплея. Попробуйте исследовать на предмет громкости окружающие вас источники звука.
Добавив в конструкцию робота датчик звука, вы можете сделать так, чтобы робот изменил поведение при активации датчика.
Калибровка датчика звука. Слайд №3-4
Условия внешней среды могут повлиять на чувствительность датчиков, поэтому очень важно откалибровать эти датчики к конкретной обстановке (к зашумленности) для более эффективной работы.
Есть два способа для калибровки звукового датчика с помощью программного обеспечения MINDSTORMS NXT.
Первый заключается в использовании функции калибровки датчиков из меню Tools. С помощью этой функции, можно откалибровать датчик, используя специальную утилиту MINDSTORMS NXT (не используя вашу программу). Например, если вы посещаете соревнования LEGO MINDSTORMS NXT или изменили внешние условия, вы можете откалибровать датчик один раз (у себя на столе) и вам не придется беспокоиться о калибровке каждый раз, когда вы запустите программу.
Второй вариант для калибровки включает в себя использование нескольких блоков калибровки в вашей программе. Каждый раз, когда вы запускаете программу, эти блоки будут калибровать датчики для текущих условий.
Практическая работа: «Калибровка датчика звука. Восстановление заводских значений датчика»
Сегодня мы рассмотрим первый вариант калибровки, используя функцию калибровки датчиков.
Калибровка датчика
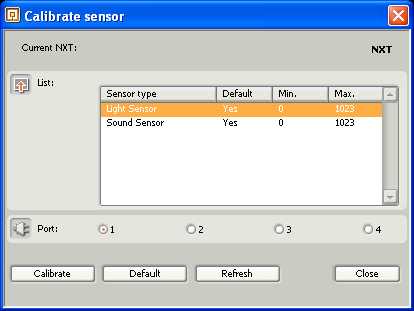
Чтобы использовать эту функцию, сначала убедитесь, что ваш NXT подключен к компьютеру, и что он включен. Кроме того, убедитесь, что датчики, которые вы хотите калибровать подключены к NXT. Обратите особое внимание на порты, к которым они подключены. После проверки выберите функцию калибровки датчиков в меню Tools. При этом появится диалоговое окно "Калибровка датчиков". Если Lego NXT не подключен к компьютеру, диалоговое окно будет неактивно.
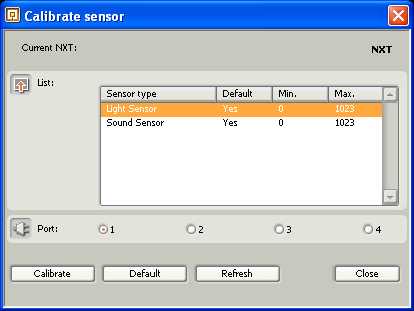
Выберите датчик звука ("Sound Sensor") и укажите, к какому порту подключен датчик. Затем нажмите на кнопку Калибровка ("Calibrate"). После этого в контроллер NXT будет загружена программа для калибровки датчика, она запустится автоматически.
На экране NXT вы увидите текст: "Минимальное значение". Создайте для датчика условия, соответствующие минимальному уровню шума. Нажмите оранжевую кнопку "Enter" на NXT.
Далее вы увидите текст: "Максимальное значение". Создайте для датчика условия, соответствующие максимальному уровню шума. Нажмите оранжевую кнопку "Enter" еще раз.
Калибровка завершена.
Примечание:
Значения калибровки устанавливаемые с помощью функции калибровки датчиков могут быть перезаписаны. Самая последняя калибровка будет иметь преимущество. Калибровка будет оставаться в силе, пока вы не перекалибруете или не сбросите их.
после завершения процесса калибровка будет работать для конкретного датчика независимо от того, какой порт вы подключаете. Если вы проводили калибровку датчика звука на порту 3, калибровка останется в силе, даже если вы переключите датчик на порт
Восстановление значений калибровки по умолчанию
Если вы хотите вернуться к заводским значениям калибровки, "по умолчанию", следуйте инструкциям ниже:
Во-первых, включите NXT, и подключите его к компьютеру.
Выберите калибровки датчиков - пункт меню "Tools". Появится диалоговое окно "Калибровка датчиков" ("Calibrate Sensor").
Выберите датчик, которому нужно восстановить заводские настройки и нажмите кнопку "По умолчанию" (Default).
Сборка базовой модели робота и крепеж датчика звука. Слайд №5-33
Мы откалибровали датчик, теперь можно приступить к сборке базовой модели робота и к установке на нее датчика звука.

Для создания базовой модели воспользуемся инструкцией:
Презентация (Слайды № 5-33)
Производим крепеж модуля звука Слайд №34-35
Практическая работа: «Программирование робота»
Мы создали автономного робота на базе трёхколёсной тележки и оснастили его датчиком звука, теперь можно перейти к программированию робота.
Обнаружение звука. Слайд №36-38
Первая задача, которую должен выполнить робот – это остановка после превышения порогового значения уровня звука.
То есть робот, продолжая движение, должен ожидать наступления определенного события-превышения уровня громкости, после чего должен остановиться.
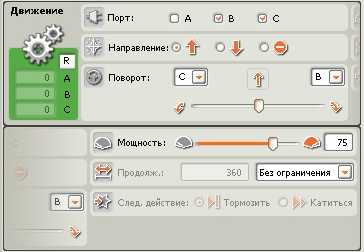
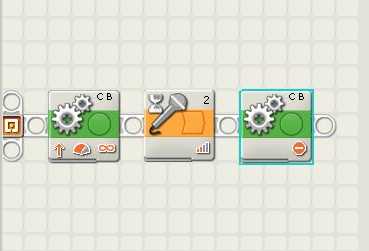
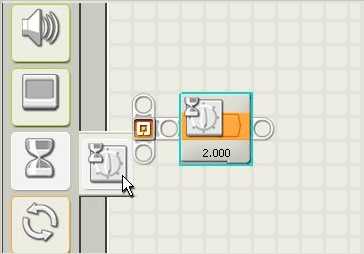
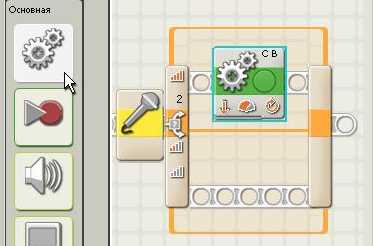
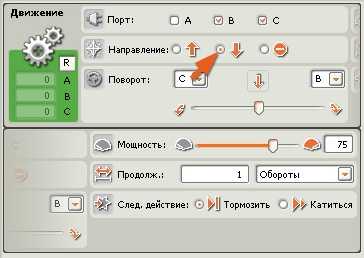
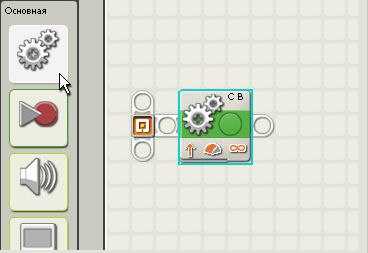
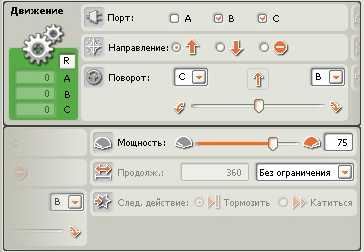
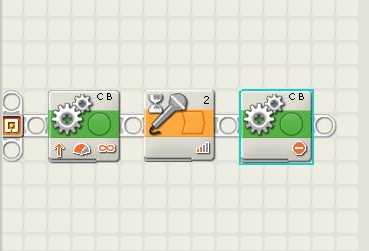
Для решения данной задачи сначала заставим робота двигаться. Для этого выполним шаги 1-2.
1.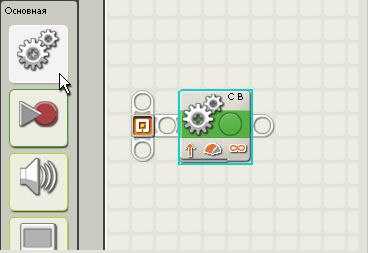 2.
2.
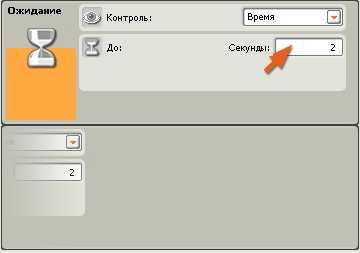
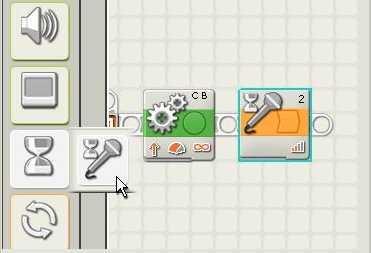
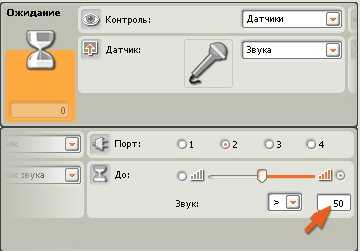
Теперь необходимо заставить робота ожидать превышения порогового значения уровня громкости (за пороговое значение мы принимаем среднее арифметическое между минимальным и максимальным значениями).
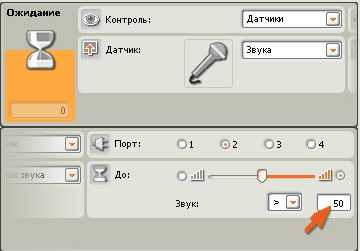
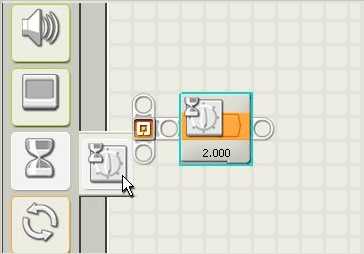
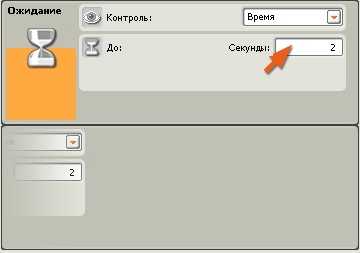
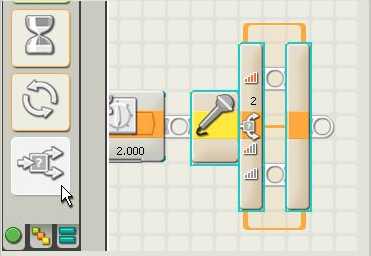
Для этого выполним шаги 3-4 (используем блок ОЖИДАНИЕ)
3.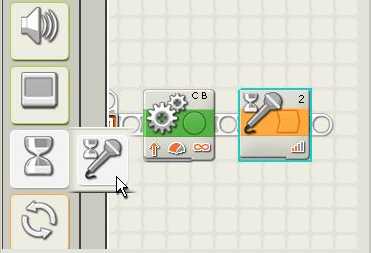 4.
4. 
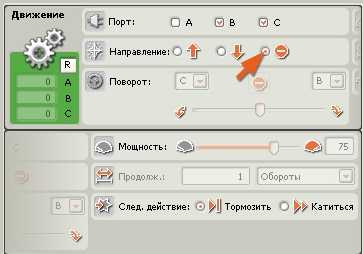
После того как произойдет превышение уровня громкости, робот должен выполнить полную остановку. Шаги 5-6
5. 6.
6.  7.
7.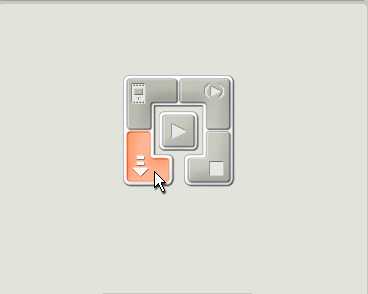
После программирования робота нужно загрузить алгоритм в блок NXT, выполнив шаг 7.
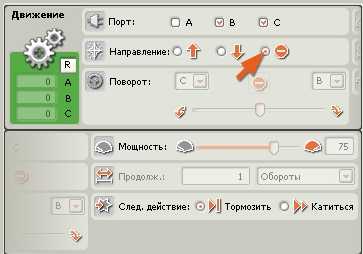
Управление по звуку. Слайд №39-41
Следующая задача, которую нам предстоит решить - это «управление по звуку».
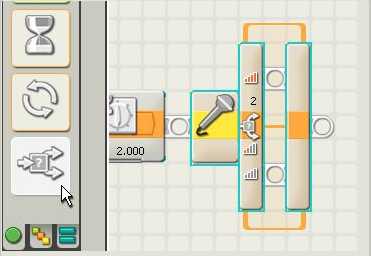
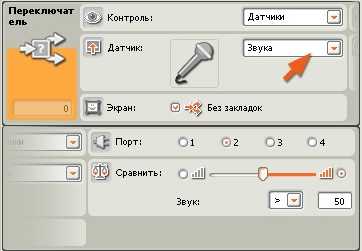
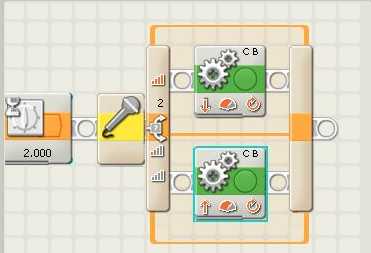
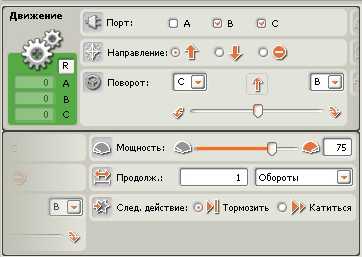
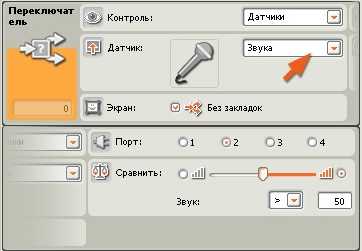
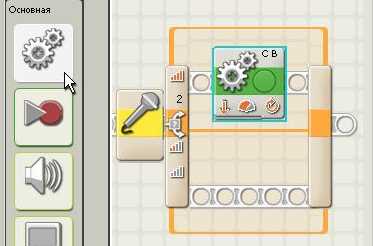
Необходимо составить программу, которая будет управлять направлением движения робота с помощью датчика звука. В данной программе используется блок-переключатель (условие). Если уровень звука превышает 50, то робот должен двигаться назад, если не превышает, робот должен двигаться вперед.
Для решения данной задачи выполним шаги 1-8.
1. 2.
2. 
3. 4.
4. 
5. 6.
6. 
 8.
8.
После окончания работы над программой ее необходимо загрузить в микроконтроллер (шаг 9), теперь робот готов к испытаниям.
9
Испытания робота.
Обучающиеся проводят испытания собранной и запрограммированной модели.
Рефлексия. Слайд №42
Ответы на вопросы Google-формы
https://docs.google.com/forms/d/13om2oZgBWB3ZM08fRq7dE_elgvaRzZbBanEiQlI8-ZM/viewform
Итоги занятия
В ходе занятия вы научились использовать свойства датчика звука для решения различного рода задач. Предлагаю вам ответить на вопрос: существует ли возможность улучшить параметры ваших роботов? И как это можно сделать?
Ответы обучающихся:
Приведите примеры возможного использования свойства датчиков звука в других областях науки и техники, на производстве и в быту.
Ответы обучающихся:
Знания и навыки, которые вы получили на занятии, будут способствовать быстрому пониманию принципов работы сложных механизмов и способов управления техническими устройствами.
Слайд №43 Спасибо всем за активную работу!
infourok.ru
Тема 9. Акустические датчики.
Микрофон – электроакустический прибор, преобразовывающий звуковые колебания в колебания электрического тока, устройство ввода. Принцип работы: давление звуковых колебаний воздуха, воды или твёрдого вещества действует на тонкую мембрану микрофона, колебания мембраны возбуждают электрические колебания. Свойства акустико-механической системы зависят от того, воздействует ли звуковое давление на одну сторону диафрагмы (микрофон давления) или на обе стороны, а во втором случае - симметрично ли это воздействие (микрофон градиента давления) или на одну из сторон диафрагмы действуют колебания, непосредственно возбуждающие её, а на вторую — прошедшие через какое-либо механическое или акустическое сопротивление или систему задержки времени (асимметричный микрофон градиента давления).
Микрофон – электроакустический прибор, преобразовывающий звуковые колебания в колебания электрического тока, устройство ввода. Служит первичным звеном в цепочке звукозаписывающего тракта или звукоусиления. Микрофоны используются во многих устройствах, таких как телефоны и магнитофоны, в звукозаписи и видеозаписи, на радио и телевидении, для радиосвязи, также для ультразвукового контроля измерения. По признаку преобразования акустические колебаний микрофоны подразделяются на:
электродинамические;
электромагнитные;
электростатические;
угольные;
пьезоэлектрические;
полупроводниковые.
Принцип работы микрофона заключается в том, что давление звуковых колебаний воздуха, воды или твёрдого вещества действует на тонкую мембрану микрофона. В свою очередь, колебания мембраны возбуждают электрические колебания; в зависимости от типа микрофона для этого используется явление электромагнитной индукции, изменение ёмкости конденсаторов или пьезоэлектрический эффект.
Свойства акустико-механической системы сильно зависят от того, воздействует ли звуковое давление на одну сторону диафрагмы (микрофон давления) или на обе стороны, а во втором случае от того, симметрично ли это воздействие (микрофон градиента давления) или на одну из сторон диафрагмы действуют колебания, непосредственно возбуждающие её, а на вторую — прошедшие через какое-либо механическое или акустическое сопротивление или систему задержки времени (асимметричный микрофон градиента давления).
Микрофоны характеризуются следующими параметрами:
Чувствительность микрофона — это отношение напряжения на выходе микрофона к воздействующему на него звуковому давлению при заданной частоте (как правило, 1000 Гц), выраженное в милливольтах на паскаль (мВ/Па). Чем больше это значение, тем выше чувствительность микрофона.
Номинальный диапазон рабочих частот — диапазон частот, в котором микрофон воспринимает акустические колебания и в котором нормируются его параметры.
Неравномерность частотной характеристики - разность между максимальным и минимальным уровнем чувствительности микрофона в номинальном диапазоне частот.
Модуль полного электрического сопротивления — нормированное значение выходного или внутреннего электрического сопротивления на частоте 1 кГц.
Характеристика направленности — зависимость чувствительности микрофона (в свободном поле на определённой частоте) от угла между осью микрофона и направлением на источник звука.
Уровень собственного шума микрофона — выраженное в децибелах отношение эффективного значения напряжения, обусловленного флуктуациями давления в окружающей среде и тепловыми шумами различных сопротивлений в электрической части микрофона, к напряжению, развиваемому микрофоном на нагрузке при давлении 1 Па при воздействии на микрофон полезного сигнала с эффективным давлением 0,1 Па.
Рис. 3. Электродинамический микрофон
Электродинамический микрофон наиболее распространенный. Он представляет собой мембрану, соединённую с лёгким токопроводом, который помещен в сильное магнитное поле, создаваемое постоянным магнитом. Колебания давления воздуха (звук) воздействуют на мембрану и приводят в движение токопровод. Когда токопровод пересекает силовые линии магнитного поля, в нём наводится ЭДС индукции. ЭДС индукции ропорциональна амплитуде колебаний мембраны и частоте колебаний.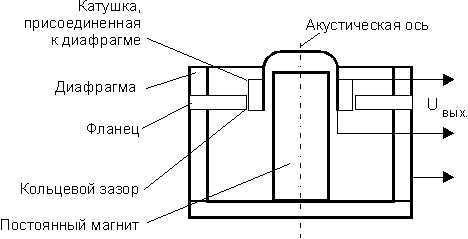
По типу проводника делятся на : катушечные, ленточные.
Конденсаторные микрофоны. (Электростатические микрофоны).
Рис. 4.
Конденсаторный микрофон.
На рис 6. приведена схема, объясняющая принцип работы конденсаторного микрофона. Выполненные из электропроводного материала мембрана (1) и электрод (2) разделены изолирующим (3) и представляют собой конденсатор. Жёстко натянутая мембрана под воздействием звукового давления совершает колебательные движения относительно неподвижного электрода. Конденсатор включен в электрическую цепь последовательно с источником напряжения постоянного тока и активным нагрузочным сопротивлением R. При колебаниях мембраны ёмкость конденсатора меняется с частотой воздействующего на мембрану звукового давления. В электрической цепи появляется переменный ток той же частоты и на нагрузочном сопротивлении возникает переменное напряжение, являющееся выходным сигналом микрофона.
Рис. 5. Угольный микрофон
Угольные микрофоны (резистивные микрофоны) – один из первых типов, содержит угольный порошок, размещенный между платинами и заключенный в капсулу. Одна из пластин соединяется с мембраной, при изменении давления на порошок, изменяется давление между отдельными зернами порошка и, в результате, изменяется сопротивление между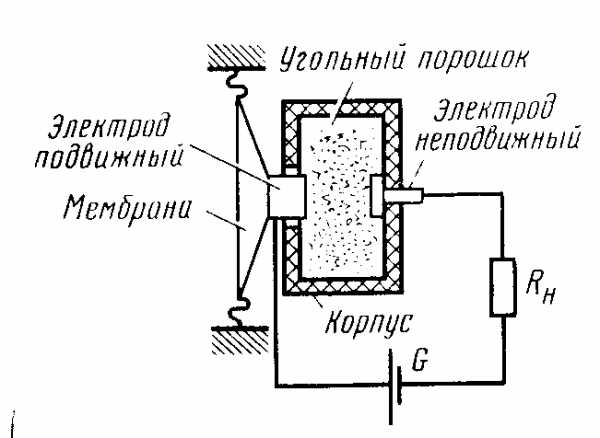
пластинами. Если пропускать между пластинами постоянный ток, то напряжение будет зависеть от давления на мембрану. Такой микрофон практически не требует усиления, с его выхода можно подавать на наушники, усилитель; однако плохая полоса пропускания, не чувствителен в сильно низким и высоким частотам, требует питания постоянным током, высокий уровень шумов.
Электретные микрофоны
Рис.6. Электретный микрофон.
Электреетный микрофоон — по принципу работы являются теми же конденсаторными, но постоянное напряжение в них обеспечивается зарядом электрета, тонким слоем нанесённого на мембрану и сохраняющим этот заряд продолжительное время. Поскольку электростатические микрофоны обладают высоким выходным сопротивлением, то для его уменьшения, как правило, в корпус микрофона встраивают истоковый повторитель на полевом n-канальном транзисторе с р-п переходом. Это позволяет снизить выходное сопротивление до величины не более 3 + 4 кОм и уменьшить потери сигнала при подключении к входу усилителя сигнала микрофона. У электретных микрофонов с двумя выводами выход микрофона выполнен по схеме усилителя с открытым стоком.Для разработки простых микрофонов может использоваться пьезоэлектрический эффект. Пьезоэлектрический кристалл является прямым преобразователем механического напряжения в электрический заряд. Наиболее часто используемым материалом для изготовления датчиков является пьезоэлектрическая керамика, которая может работать на очень высоких частотах. По этой причине пьезоэлектрические датчики применяются для преобразования ультразвуковых волн. Такие датчики также используются и в звуковом диапазоне, пьезоэлектрические микрофоны часто можно встретить в разнообразной аудиоаппаратуре. Примерами применения пьезоэлектрических акустических датчиков являются управляемые голосом устройства. Примером является устройство состоящее из пьезоэлектрического керамического диска с двумя электродами, нанесёнными на него с двух сторон. Электроды соединяются проводами либо при помощи токопроводящей эпоксидной смолы, методом пайки.
studfiles.net
По каким критериям выбирать звуковой охранный извещатель
 Самой уязвимой зоной в помещении являются оконные проемы. Нет ничего легче для злоумышленника, чем разбить стекло и проникнуть внутрь здания. Для их защиты устанавливают роллеты, однако и их не очень сложно вскрыть.
Самой уязвимой зоной в помещении являются оконные проемы. Нет ничего легче для злоумышленника, чем разбить стекло и проникнуть внутрь здания. Для их защиты устанавливают роллеты, однако и их не очень сложно вскрыть.
Поэтому все чаще в качестве защиты от несанкционированного проникновения применяют извещатель поверхностный звуковой охранного типа. Он может быть установлен на стекло любого типа и срабатывает при его разрушении.
Содержание:
- Устройство и принцип работы прибора
- Виды и их особенности
- Обзор популярных моделей, также Свирель и Арфа
- Совет специалиста — особенности выбора
Что представляет собой звуковой датчик?
В таком извещателе роль чувствительного элемента играет конденсаторный микрофон, внутрь которого встроен предусилитель. Процесс работы устройства заключается в передаче сигнала с микрофона на усилитель с преобразованием его из электрического, а с него на микроконтроллер. Последний осуществляет проверку напряжения питания и формирует предупреждающие сигналы.
 Устройства этого типа появились на рынке систем безопасности еще в начале 90-х годов, но по-прежнему остаются актуальными. За прошедшее время они стали более совершенными, снизилось число ложных срабатываний и повысилась точность фиксирования разрушения поверхности стекла.
Устройства этого типа появились на рынке систем безопасности еще в начале 90-х годов, но по-прежнему остаются актуальными. За прошедшее время они стали более совершенными, снизилось число ложных срабатываний и повысилась точность фиксирования разрушения поверхности стекла.
Датчик охранный поверхностный звуковой срабатывает на определенный сигнал, например, на бьющееся стекло. Принцип работы такого устройства не очень сложный, он заключается в следующем. Рассматривая устройство прибора, можно увидеть, что в нем присутствует микрофон. Вся основная работа выполняется именно этой деталью. Он преобразует звук в электрический сигнал. Также в механизм датчика включены и другие электронные устройства, отвечающие за деление сигнала на составляющие с последующим их анализом.
Что из себя представляет датчик акустический:
При совпадении производимого звука с имеющими эталонами, характерными для бьющегося стекла, формируется сигнал, который поступает на пульт ПКП. Такой принцип действия очень часто приводит к ложным срабатываниям, поэтому его несколько модифицировали.
Теперь получаемый сигнал разбивается на низко и высокочастотную компоненты, анализ которых выполняется отдельно. Это позволило несколько уменьшить число ложных сигналов, но избежать их совсем пока еще не получилось.
В зависимости от того, что стекло разного типа может издавать непохожие звуки, в процессе разбивания, датчики звука имеют несколько типов маркировки, соответствующих виду стекла по толщине, плотности и типу поверхности. К тому же большинство современных датчиков имеют тонкую настройку чувствительности, что делает их работу эффективной.
Виды звуковых извещателей
Классификация этого типа охранного оборудования зависит от принципа действия приборов. Они подразделяются на:
- электро-контактные – работающие на фиксацию механической целостности стекла
- ударно-контактные – срабатывают при возникновении колебаний, которые характеризуют механическое разрушение поверхности
- акустические – определяющие звуковые колебания, возникающие в процессе разбивания
Датчики первого типа в настоящее время практически не используются, так как монтаж таких устройств имеет свои сложности и достаточно трудоемкий. Еще одним недостатком является тот факт, что такие извещатели слишком хорошо видны злоумышленникам и представляют собой полоску фольги или провод, расположенный по периметру стекла.
Смотрим про датчик ударно — контактный:
Ударно-контактные модели реагируют на воздействие каким-либо предметом. Они формируют сигнал при запуске инерционных свойств элементов. Установка таких приборов осуществляется на внутренней поверхности стекол, что ограничивает их применение, особенно для больших зданий.
Акустические приборы– одни из самых эффективных. Они удачно сочетают в себе простоту в монтаже и эксплуатации. Один такой прибор устанавливается для нескольких оконных проемов одновременно, что позволяет снизить стоимость охранной системы. Реагирует извещатель на звук разбиваемого стекла, причем не только улавливая его, но и проводя полный анализ ситуации.
Выбираем лучшую марку датчика – Свирель или Арфа?
Извещатель охранный поверхностный выпускается производителями как отечественных, так и зарубежных компаний.
Среди них наибольшей популярностью пользуется продукция компаний:
- Аргус-Спектр (Санкт-Петербург)
- НТЦ Теко (Казань)
- Pyronix (Великобритания)
- DSC (Канада)
- Crow (Израиль)
Рассмотреть продукцию каждого производителя в одной статье невозможно, поэтому мы остановимся на обзоре только двух моделей, выпускаемых отечественными компаниями – извещателях Арфа и Свирель.
 Извещатель марки Арфа охранный поверхностный звуковой представляющий собой миниатюрный датчик, который используется для фиксации разбивания стекла в окнах или дверном полотне. При этом формируется сигнал путем размыкания контактов реле прибора.
Извещатель марки Арфа охранный поверхностный звуковой представляющий собой миниатюрный датчик, который используется для фиксации разбивания стекла в окнах или дверном полотне. При этом формируется сигнал путем размыкания контактов реле прибора.
Установка датчика может выполняться на любой вертикальной конструкции, разделяющей пространство или оконном проеме. В зависимости от расположения можно изменять и чувствительность прибора.
Его главным достоинством является возможность обнаружения разрушений для 6 типов стекла: от самого обычного до армированного или покрытого специальной пленкой.
Причем, имея высокую обнаруживающую способность, прибор способен фиксировать даже самые малые разрушения остекленных фрагментов.
Извещатель Свирель относится к охранно-пожарному оборудованию. Он чаще всего применяется для подачи сигнала типа «сирена» при обнаружении несанкционированного проникновения на объект. Приборы этой марки выпускаются в 4-х модификациях с одним или двумя пьезоэлектрическими излучателями на 12 или 24 В.
Смотрим видео о продукции Crow:
Применение извещателей охранных поверхностных звуковых типа Свирель допускается как внутри помещения, так и на улице, благодаря водозащищенному исполнению корпуса. Они способны обеспечивать эффективную совместную работу с различными ПКП, имеющими выход, используемый для подачи напряжения постоянного тока при срабатывании датчика.
О чем нельзя забывать при выборе?
Большое разнообразие современных моделей извещателей охранных поверхностных звуковых адресных с2000 СТ предусматривает возможность приобретения оборудования с учетом акустики контролируемого объекта, что позволяет практически избежать ложных срабатываний.
Однако, при выборе к наиболее важным относятся следующие параметры:
- вид, толщина и площадь, обслуживаемой поверхности
- дальность действия прибора
- наличие антимаскирования
- тип электропитания
Учитывая эти показатели, вы сможете укомплектовать систему охраны оборудованием, которое обеспечит высокую эффективность ее работы и, следовательно, поможет сохранить имущество. Выбрать одну модель датчика и оценить ее как самую лучшую очень сложно, потому, что каждая из них имеет свои особенности. Здесь все зависит от параметров охраняемого объекта и желаемого результата, которого ожидает пользователь.
moysignal.ru
Конспект занятия по теме Виды датчиков. Датчик звука назначение, способы крепежа
Тема: «Виды датчиков. Датчик звука назначение, способы крепежа»
Подлесных Елена Викторовна, МБОУ ДО Дом детского творчества, педагог дополнительного образования, учитель информатики и ИКТ МБОУ «СШ №17», ЯНАО, г. Новый Уренгой
Предмет (направленность): робототехника (научно-техническое творчество).
Возраст детей: 11 - 15 лет
Место проведения: класс.
Цели занятия:
Ввести понятие «датчик» (сенсор) Lego Mindstroms NXT, познакомить обучающихся с принципом работы датчика звука и способами его крепежа.
Задачи:
Образовательные: Сконструировать и запрограммировать базовую модель робота с использованием датчика звука.
Развивающие: развитие абстрактного и логического мышления, умения ориентироваться в пространстве, развитие мелкой моторики, развитие навыков работы с браузером и Google-формами
Воспитательные: Формировать навыки бережного отношения к собственным вещам и школьному имуществу
Форма занятия - групповая (практическая работа)
Оборудование:
компьютеры, проектор;
Лего-конструкторы Mindstroms NXT 2.0; ПК с установленной средой программирования ПервоРоботNXT 1.1.
План занятия:
Организационный момент
Изучение нового материала
Практическая работа №1: «Калибровка датчика звука. Восстановление заводских значений датчика»
Практическая работа №2: «Программирование робота»
Испытание робота
Рефлексия
Итоги занятия
Ход занятия:
Организационный момент
Рассадка, подготовка конструктора и организация рабочего места. Напоминание правил техники безопасности.
Изучение нового материала
Слайд №1.
Добрый день! Сегодня на занятии мы продолжим изучать принципы работы датчиков MINDSTORMS NXT. И датчик, о котором пойдет речь - это датчик звука.
Вопрос: Давайте вспомним, что же такое датчик (сенсор)?
Ответы обучающихся:
Датчик — средство измерений, предназначенное для выработки сигнала измерительной информации в форме, удобной для передачи, дальнейшего преобразования, обработки и (или) хранения, но не поддающейся непосредственному восприятию наблюдателем.
Вопрос: А как вы думаете, для чего нужен датчик звука?
Ответы обучающихся:
А давайте поближе познакомимся с этим сенсором!
Датчик звука (sound sensor) Слайд №2.
Датчик звука (или просто микрофон) измеряет уровень громкости звукового сигнала в (децибелах) dB и dBA.
Для справки, dBA - звуки дипазона 20-20000 Гц, воспринимаемые ухом человека, dB - весь дипазон, включая инфразвук и ультразвук.
Максимальное звуковое давление, которое может измерить датчик, - около 90 dB, что соответствуюет громкости газонокосилки. Показания датчика звука выражаются в процентах [%] от максимальной громкости, которую он способен зафиксировать.
Для сравнения уровень 4-5% соответствует фоновому шуму жилой комнаты, 5-10% - разговору на небольшом отдалении, 10-30% - разговору в непосредственной близости от микрофона. Наконец уровень 30-100% соответствует крику или громкой музыке. Измерения проводятся, когда микрофон находится на расстоянии 1 м от источника звука.
Режим просмотра (View)
Проверить датчик звука можно в режиме Просмотра. Подсоедините датчик ко входу 2 NXT.
Перейдите в режим Просмотра (View) и выберите иконку Sound dB. Выберите порт 2.
Издавайте звуки в микрофон и наблюдайте за показаниями датчика на экране дисплея. Попробуйте исследовать на предмет громкости окружающие вас источники звука.
Добавив в конструкцию робота датчик звука, вы можете сделать так, чтобы робот изменил поведение при активации датчика.
Калибровка датчика звука. Слайд №3-4
Условия внешней среды могут повлиять на чувствительность датчиков, поэтому очень важно откалибровать эти датчики к конкретной обстановке (к зашумленности) для более эффективной работы.
Есть два способа для калибровки звукового датчика с помощью программного обеспечения MINDSTORMS NXT.
Первый заключается в использовании функции калибровки датчиков из меню Tools. С помощью этой функции, можно откалибровать датчик, используя специальную утилиту MINDSTORMS NXT (не используя вашу программу). Например, если вы посещаете соревнования LEGO MINDSTORMS NXT или изменили внешние условия, вы можете откалибровать датчик один раз (у себя на столе) и вам не придется беспокоиться о калибровке каждый раз, когда вы запустите программу.
Второй вариант для калибровки включает в себя использование нескольких блоков калибровки в вашей программе. Каждый раз, когда вы запускаете программу, эти блоки будут калибровать датчики для текущих условий.
Практическая работа: «Калибровка датчика звука. Восстановление заводских значений датчика»
Сегодня мы рассмотрим первый вариант калибровки, используя функцию калибровки датчиков.
Калибровка датчика
Чтобы использовать эту функцию, сначала убедитесь, что ваш NXT подключен к компьютеру, и что он включен. Кроме того, убедитесь, что датчики, которые вы хотите калибровать подключены к NXT. Обратите особое внимание на порты, к которым они подключены. После проверки выберите функцию калибровки датчиков в меню Tools. При этом появится диалоговое окно "Калибровка датчиков". Если Lego NXT не подключен к компьютеру, диалоговое окно будет неактивно.
Выберите датчик звука ("Sound Sensor") и укажите, к какому порту подключен датчик. Затем нажмите на кнопку Калибровка ("Calibrate"). После этого в контроллер NXT будет загружена программа для калибровки датчика, она запустится автоматически.
На экране NXT вы увидите текст: "Минимальное значение". Создайте для датчика условия, соответствующие минимальному уровню шума. Нажмите оранжевую кнопку "Enter" на NXT.
Далее вы увидите текст: "Максимальное значение". Создайте для датчика условия, соответствующие максимальному уровню шума. Нажмите оранжевую кнопку "Enter" еще раз.
Калибровка завершена.
Примечание:
Значения калибровки устанавливаемые с помощью функции калибровки датчиков могут быть перезаписаны. Самая последняя калибровка будет иметь преимущество. Калибровка будет оставаться в силе, пока вы не перекалибруете или не сбросите их.
после завершения процесса калибровка будет работать для конкретного датчика независимо от того, какой порт вы подключаете. Если вы проводили калибровку датчика звука на порту 3, калибровка останется в силе, даже если вы переключите датчик на порт
Восстановление значений калибровки по умолчанию
Если вы хотите вернуться к заводским значениям калибровки, "по умолчанию", следуйте инструкциям ниже:
Во-первых, включите NXT, и подключите его к компьютеру.
Выберите калибровки датчиков - пункт меню "Tools". Появится диалоговое окно "Калибровка датчиков" ("Calibrate Sensor").
Выберите датчик, которому нужно восстановить заводские настройки и нажмите кнопку "По умолчанию" (Default).
Сборка базовой модели робота и крепеж датчика звука. Слайд №5-33
Мы откалибровали датчик, теперь можно приступить к сборке базовой модели робота и к установке на нее датчика звука.

Для создания базовой модели воспользуемся инструкцией:
Презентация (Слайды № 5-33)
Производим крепеж модуля звука Слайд №34-35
Практическая работа: «Программирование робота»
Мы создали автономного робота на базе трёхколёсной тележки и оснастили его датчиком звука, теперь можно перейти к программированию робота.
Обнаружение звука. Слайд №36-38
Первая задача, которую должен выполнить робот – это остановка после превышения порогового значения уровня звука.
То есть робот, продолжая движение, должен ожидать наступления определенного события-превышения уровня громкости, после чего должен остановиться.
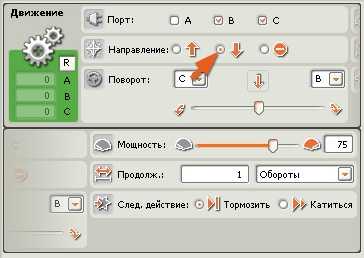
Для решения данной задачи сначала заставим робота двигаться. Для этого выполним шаги 1-2.
1. 2.
2.
Теперь необходимо заставить робота ожидать превышения порогового значения уровня громкости (за пороговое значение мы принимаем среднее арифметическое между минимальным и максимальным значениями).
Для этого выполним шаги 3-4 (используем блок ОЖИДАНИЕ)
3. 4.
4. 
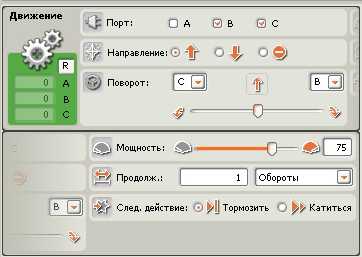
После того как произойдет превышение уровня громкости, робот должен выполнить полную остановку. Шаги 5-6
5. 6.
6.  7.
7.
После программирования робота нужно загрузить алгоритм в блок NXT, выполнив шаг 7.
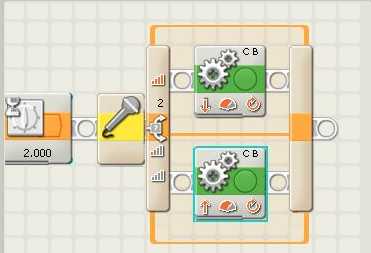
Управление по звуку. Слайд №39-41
Следующая задача, которую нам предстоит решить - это «управление по звуку».
Необходимо составить программу, которая будет управлять направлением движения робота с помощью датчика звука. В данной программе используется блок-переключатель (условие). Если уровень звука превышает 50, то робот должен двигаться назад, если не превышает, робот должен двигаться вперед.
Для решения данной задачи выполним шаги 1-8.
1. 2.
2. 
3. 4.
4. 
5. 6.
6. 
7. 8.
8.
После окончания работы над программой ее необходимо загрузить в микроконтроллер (шаг 9), теперь робот готов к испытаниям.
9
Испытания робота.
Обучающиеся проводят испытания собранной и запрограммированной модели.
Рефлексия. Слайд №42
Ответы на вопросы Google-формы
https://docs.google.com/forms/d/13om2oZgBWB3ZM08fRq7dE_elgvaRzZbBanEiQlI8-ZM/viewform
Итоги занятия
В ходе занятия вы научились использовать свойства датчика звука для решения различного рода задач. Предлагаю вам ответить на вопрос: существует ли возможность улучшить параметры ваших роботов? И как это можно сделать?
Ответы обучающихся:
Приведите примеры возможного использования свойства датчиков звука в других областях науки и техники, на производстве и в быту.
Ответы обучающихся:
Знания и навыки, которые вы получили на занятии, будут способствовать быстрому пониманию принципов работы сложных механизмов и способов управления техническими устройствами.
Слайд №43 Спасибо всем за активную работу!
multiurok.ru
Датчики звука
Название:
Артикул:
Текст:
Выберите категорию:Все НОВИНКИ Приборы для защиты бытовой техники Приборы для управления освещением » Беспроводное управление освещением » Управление по Wi-fi » Блоки защиты ламп Гранит » Датчики движения » Датчики звука » Диммеры (светорегуляторы) » Дистанционные выключатели » Регуляторы света, корпуса, усилители »» Акустические выключатели »» Датчики движения и присутствия »» Корпуса, усилители »» Сумеречные выключатели »» Управление через SMS-сообщения »» Хлопковые выключатели » Сапфир Выключатели дистанционные » Рубин Контроллеры » Таймеры » Контроллеры световых эффектов »» Для ламп накаливания »» Для высоковольтных светодиодов »» Для низковольтных светодиодов » Фотореле » Светореле (фотореле наружной установки) »» С плавным пуском для ламп накаливания и галогеновых ламп ФБ-1М, ФБ-3М, ФБ-7 »» Аналоговые контактные ФБ-5, ФБ-8, ФБ-16 »» Постоянного тока ФБ-10 »» Бесконтактные ФБ-2,ФБ-2М,ФБ-13,ФБ-14 »» Цифровые контактные ФБ-5М, ФБ-9 »» Морозоустойчивые ФБ-11, ФБ-11М, ФБ-15 »» С встроенным реле времени ФБ-4, ФБ-4М »» Трехфазные ФБ-6, ФБ-6М » Фотосенсоры (фотодатчики) » Экосвет Блоки энергосберегающие Реле и автоматика » Амперметры, Указатели тока » Вольтметры, Указатели напряжения » Блоки питания » Блоки плавного пуска » Выключатели автоматические » Диффавтоматы, УЗО » Индикаторы » Источники бесперебойного питания »» Бесперебойное питание котлов » Импульсаторы электромагнитные » Контакторы » Ограничители мощности » Программируемые таймеры с фотореле и контролем напряжения » Переключатели фаз » Регистратор электрических процессов » Реле времени » Реле импульсные (бистабильные) » Реле напряжения »» Однофазные реле напряжения (220В) »» Трехфазные реле напряжения (380В) » Реле тока » Реле контроля изоляции » Реле контроля уровня » Реле контроля фаз » Реле промежуточные электромагнитные » Реле светочувствительные (фотореле) » Реле светочувствительные гермокорпус (светореле) » Реле тепловые » Счетчики, Устройства учета и управления » Стабилизаторы напряжения » Таймеры » Терморегуляторы » Температурные контроллеры и реле температуры » Термометры электронные » Устройства защиты двигателей » Устройства управления резервным питанием Светильники и прожекторы » Светильники для ЖКХ »» Фотоакустичекие (с датчиком звука и света) »» Светодиодные с хлопковым выключателем »» Сумеречные, с встроенным фотореле »» С встроенным датчиком движения »» Светодиодные без датчиков »» Светодиодные на низкое напряжение » Встраиваемые светодиодные LED светильники » Накладные светодиодные светильники » Подвесные светодионые светильники » Промышленные светодиодные светильники » Светодиодные лампы » Светодиодные лампы высокой мощности » Светодиодные панели » Светодиодные прожекторы » Светодиодные модули 220 Вольт » Уличные светодиодные светильники УМНЫЙ ДОМ » Ноолайт (NooLite) Система беспроводного радиоуправления »» Что такое Ноолайт (NooLite) »» Пульты Ноолайт (nooLite) »»» Стационарные сенсорные пульты »»» Стационарные кнопочные пульты »»» Встраиваемые, совместимые с любым выключателем »»» Пульты-брелоки »» Силовые блоки Ноолайт (nooLite) »» Наборы Умный дом за 1 час, Наборы Проходной выключатель без проводов »» Управление со смартфона (планшета) »»» Ethernet-шлюз PR1132 Ноотехника Ноолайт »»» Контроллер PRF-64 »» Беспроводные датчики Ноотехника Ноолайт »» Адаптеры Ноолайт (nooLite) »» Модули Ноолайт »» API » SONOFF Управление по Wi-Fi и с пультов » ВИДЕОНАБЛЮДЕНИЕ »» Домашние камеры »» Уличные камеры »» Видеорегистраторы » Умные розетки. Управление по GSM, WI-Fi »» Устройства управления через SMS »» Умная Wi-Fi розетка »» Умные розетки отключения нагрузки »» Умная розетка с датчиком присутствия » Умная система отопления » Brenin Электронная система защиты от протечек воды Климатическая техника » Нагревательный кабель » Нагревательные коврики » Электрические теплые полы » Тепловые пушки Автомобильная электроника » Автоконтроллеры
Новинка:
ВседанетСпецпредложение:
ВседанетСпецпредложение:Вседанет
Результатов на странице: 5203550658095
Найти
xn--e1aocert2d.xn--p1ai
Модуль датчика звука для Ардуино RKP-SS-LM393 - Аудио модули
| Есть в наличииЕсть в наличии | ||
|
| ||
Датчик звука RKP-SS-LM393 предназначен для совместного использования с устройствами, использующими платформу ARDUINO (Ардуино).
Модуль звуковых колебаний или попросту датчик звука это небольшая печатная плата с установленными на ней микрофоном, микросхемой LM393, а также несколькими другими электронными компонентами.
- Благодаря своим превосходным характеристикам звуковой датчик или звуковой модуль обнаружения RKP-SS-LM393 способен обнаружить и измерить любые звуковые колебания, также звуковой сенсор поддерживает установку цифрового выхода звуковой шкалы интенсивности.
- Датчик хорошо реагирует на звуки ударов, вибрации, щелчков, например звук открывающегося замка. Плохо реагирует на речь.
- Обеспечивает регистрацию звуков установленной громкости и при этом формирует на выходе модуля логический уровень. Если вокруг тихо, то датчик звука RKP-SS-LM393 на выходе выдаёт значение напряжения близкое к уровню питания. Величина громкости звуков, на которые срабатывает датчик, регулируется переменным резистором. При превышении заданного порога громкости выходной уровень меняется на логический 0.
- Преобразование превышения звукового порога в логический сигнал происходит в датчике звука RKP-SS-LM393 благодаря компаратору LM393.
- На плате установлены два светодиода. Индикатор включения и индикатор срабатывания датчика.
- Сенсор звука имеет специальное отверстие в плате, что облегчает его монтаж и крепление на любую роботизированную платформу или шасси робота.
- Амплитудно-частотная характеристика звука на входе ограничена только характеристиками используемого микрофона.
- Датчик звука RKP-SS-LM393 станет полезным компонентом для любого робота под управлением микроконтроллера.
Спецификация на микросхему LM393: - Тип компаратора: прецизионный (Precision)- Количество компараторов в микросхеме LM393: 2 штуки- Время отклика компаратора составляет: 1.3 мкс- Тип выхода компаратора: CMOS, MOS, TTL, DTL, ECL- Ток потребления компаратора составляет: 1 мА- Диапазон напряжения питания компаратора: от ± 1.0 В до ± 18 В Посмотреть DataSheet микросхемы LM393 (формат PDF размер 144 КБ) =>>
На плате модуля установлена вилка разъема из трех контактов и нанесены подписи для каждого контакта.
Обозначение выводов датчикаВывод с меткой «VCC» –> плюс питания плюс (+3.3V ~ +5.5V)Вывод с меткой «GND» –> минус питанияВывод с меткой «OUT» –> выходной сигнал
Подробное описание всех функций модуля звука и принципиальные схемы выложены в специальной статье на нашем сайте.
Перейти к статье принципиальные схемы модуля звука =>>
Товар был добавлен в наш каталог Суббота, 27 Октября 2012
robot-kit.ru









Карта сайта

г.Краснодар, ул.Симферопольская дом 5, офис 9
![]() 8 (989) 212 27 02
8 (989) 212 27 02 ![]() 8 (861) 260 24 40
8 (861) 260 24 40
